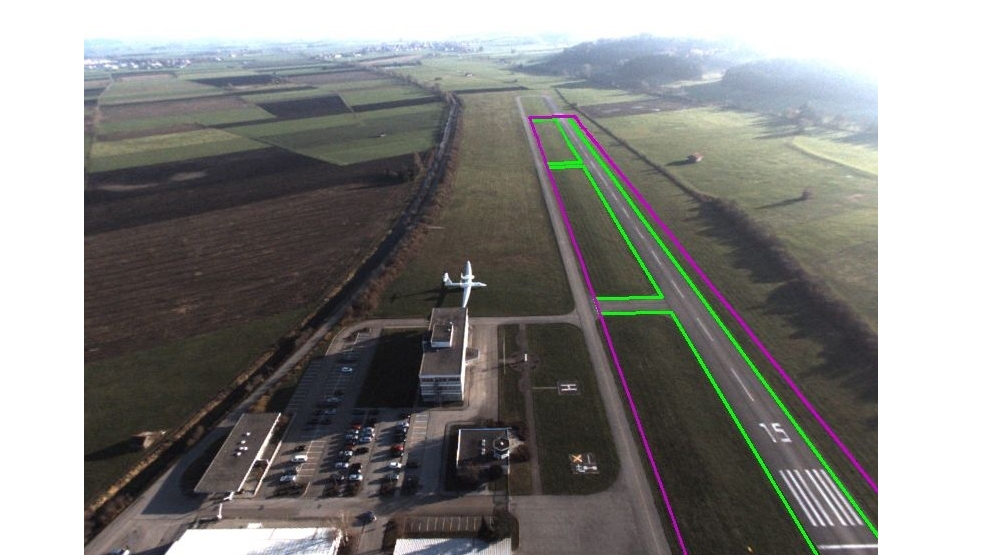
The DLR Flying Robots group is working on vision and sensor fusion algorithms for robust and highly accurate state estimation as well as for autonomous navigation. These methods are applied for instance to runway detection for automatic landing of fixed-wing UAVs and to object detection for aerial manipulation.



{kind=link}