Telemanipulation
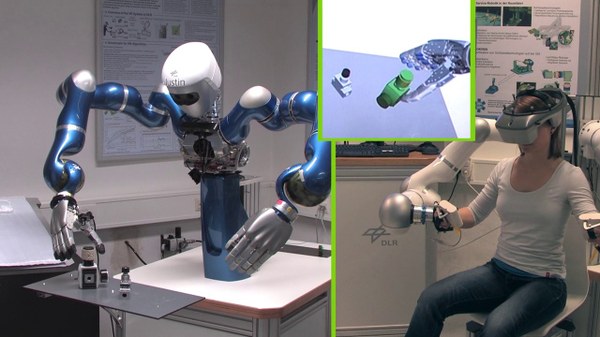
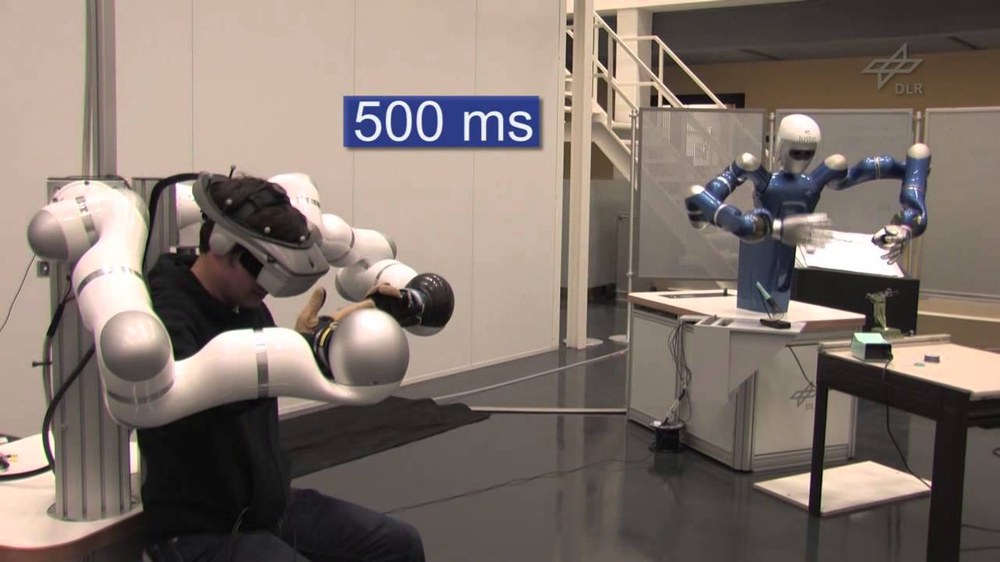
Telemanipulation of humanoid robot Justin Telemanipulation of mobile robots Telemanipulation with varying time delay and packet loss Multilateral control
The Telepresence and Virtual Reality Lab - Robotics and Mechatronics Center, DLR