
Shared Autonomy
One limitation when using complex telepresence systems is the loss of dexterity. Even if the input device can capture all movements of the operator, the robot system might not be able to follow all commanded motions due to its limited capabilites. This is especially true for complex robotic end-effectors and their respective input devices.
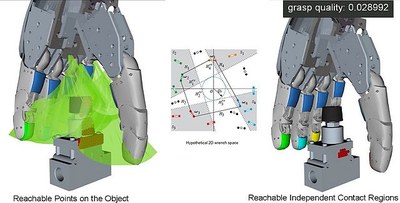
As we are using five-fingered hands as end-effectors for our telepresence system, we tackle this problem by replacing mapped direct control of robotic fingers with a semi-autonomous subtask. The finger positions are planned online using reachable independent contact regions that provide robust fingertip grasps for a multifingered hand. The workload of the operator is reduced by commanding only "open" or "close".
In contrast to many traditional grasp planners, grasps are not precomputed or stored in a database. Instead, due to the stored workspace of the robotic hand, all currently reachable points on the known object are calculated using the Voxmap-PointShell Algorithm, which allows for response times below one millisecond. Based on those reachable points, independent contact regions are calculated, providing possible fingertip positions for each finger that guarantee a force-closure grasp on the object. The desired position of each fingertip is calculated as the center of its contact region.

Selected Publications
- M. Roa, K. Hertkorn, C. Borst, and G. Hirzinger: Reachable independent contact regions for precision grasps, in Proc. IEEE Int. Conf. on Robotics and Automation, 2011, pp. 5337–5343.
- M. Roa, K. Hertkorn, F. Zacharias, C. Borst, and G. Hirzinger: Graspability map: A tool for evaluating grasp capabilities, in Proc. IEEE Int. Conf. on Intelligent Robots and Systems, 2011, pp. 1768-1774.
- K. Hertkorn, M. Roa, M. Brucker, P. Kremer, and C. Borst: Virtual reality support for teleoperation using online grasp planning, in Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2013.