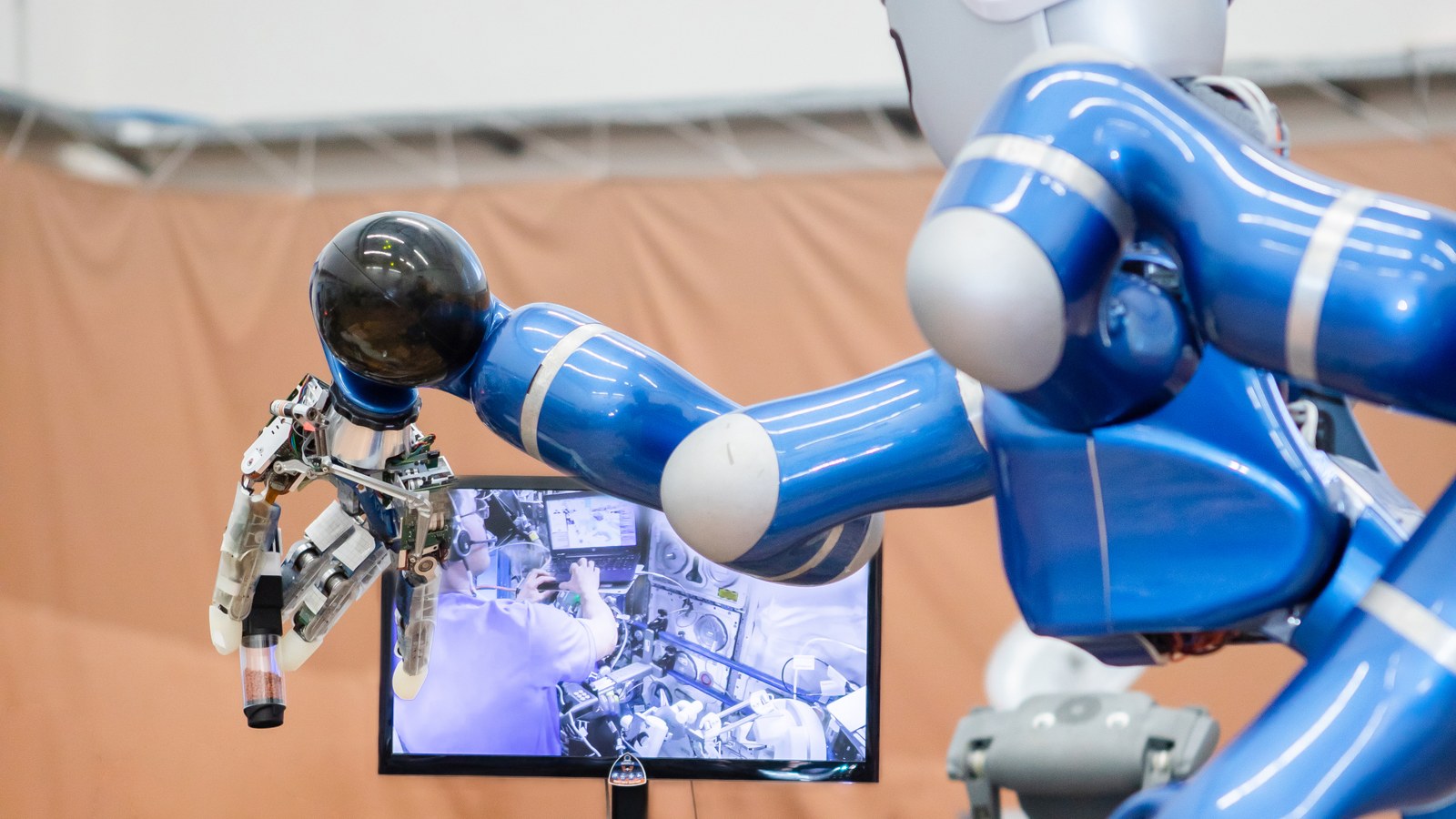
NASA-Astronaut Frank Rubio hat an Bord der ISS die Kontrolle über das Roboterteam auf dem „irdischen Mars“ am DLR in Oberpfaffenhofen. Der humanoide DLR-Roboter Rollin‘ Justin hat die Gesteinsprobe erfolgreich vom Interact Rover entgegen genommen.
Die lange Geschichte der Weltraumrobotermissionen begann 1993 mit der Robotermission Rotex an Bord des Space Shuttle. Seither haben wir diese Reise fortgesetzt. Die robotische Weltraumassistenz spielt im Rahmen der immer weiter greifenden Raumfahrtprogramme der Menschheit eine zentrale Rolle, da es weiterhin riskant und kostspielig ist, menschliches Leben im Weltraum zu schützen. Mithilfe von Robotern können wir den Erforschungsbereich erheblich erweitern, gefährliche Orte erreichen und wesentlich größere Räume erschließen. Besonders wichtig ist dies für künftige Besiedlungsmissionen, bei denen groß angelegte Habitate geschaffen werden. Im Bereich der Orbiteinsätze können Roboter Astronauten bei Außenbordeinsätzen (extravehicular activities, EVA) oder Weltraumspaziergängen bestimmte Arbeiten abnehmen und dadurch deutlich entlasten. Bei der Weltraumassistenz decken wir das gesamte Einsatzspektrum der Robotik ab – von der immersiven, feedbackgestützten Telepräsenz bis hin zur vollen Autonomie.
Humanoide Roboter sind und bleiben die geeignetsten Systeme bei telepräsenter Steuerung durch einen menschlichen Bediener. Aufgrund ihrer Ähnlichkeit mit der menschlichen Gestalt kann sich der Bediener schnell und intuitiv in die Fähigkeiten des humanoiden Roboters einarbeiten, was die Trainingszeit verkürzt und die Effizienz bei der Durchführung der Arbeiten erhöht.
Mit seiner Kombination aus hoher Nutzlast und hervorragender Geschicklichkeit, die weltweit immer noch unerreicht ist, blickt der DLR-Roboter Rollin’ Justin auf eine erfolgreiche Geschichte zurück. Unser Ziel, humanoide Roboter im Weltraum einzusetzen, verfolgt auch die NASA mit ihren Robonauten, von denen einer bereits auf der ISS eingesetzt wurde.
Verschiedene Missionen und Szenarien erfordern unterschiedliche Methoden der Steuerung und Kooperation mit humanoiden Robotern. Deshalb haben wir ein breites Spektrum von Lösungen entwickelt, die Interaktionen auf verschiedenen Abstraktionsebenen ermöglichen, von der Telepräsenz mit hohem Immersionsgrad und haptischem Feedback (Kontur-2-Mission), über die kontrollierte Autonomie (METERON-Mission) bis hin zur vollen Autonomie (Montage von Strukturen im Weltraum).


{kind=link}