
Vision Tools in the Experimental Service Satellite (ESS)


Credit:
Credit:
Credit:

Credit:

Credit:
Credit:
Credit:
Credit:
The satellite's motion is observed by a Kalman-filter based trajectory estimator. 3.2MB Mpeg One Complete tracking and capturing cycle 6.5MB Mpeg Edited movie with view from the hand-camera and addtl. sequences of our simulation. | |
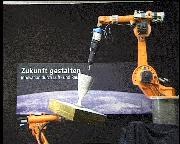
The robot tracks the satellite guided by visual servoing. Note that only one camera is needed for a complete estimation of all six degrees of freedom. | |
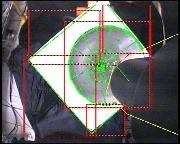
View from the hand camera. The result of the pose estimation is visualised (green wire-frame model). Note the red regions of interest of the currently tracked features. | |
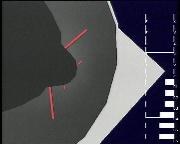
The capturing has started. The tool is equiped with two distance sensor rings which guide the tool to the center of the appogee engine. See the simulation below. | |
The locking crown is closed. The satellite has been captured. See the force-controlled movement of the two robots combined to one rigid system. | |
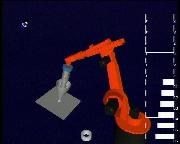
The simulation of the capturing sequence. | |
The simulation of the distance sensors within the appogee engine. | |
The simulation of the tracking. |