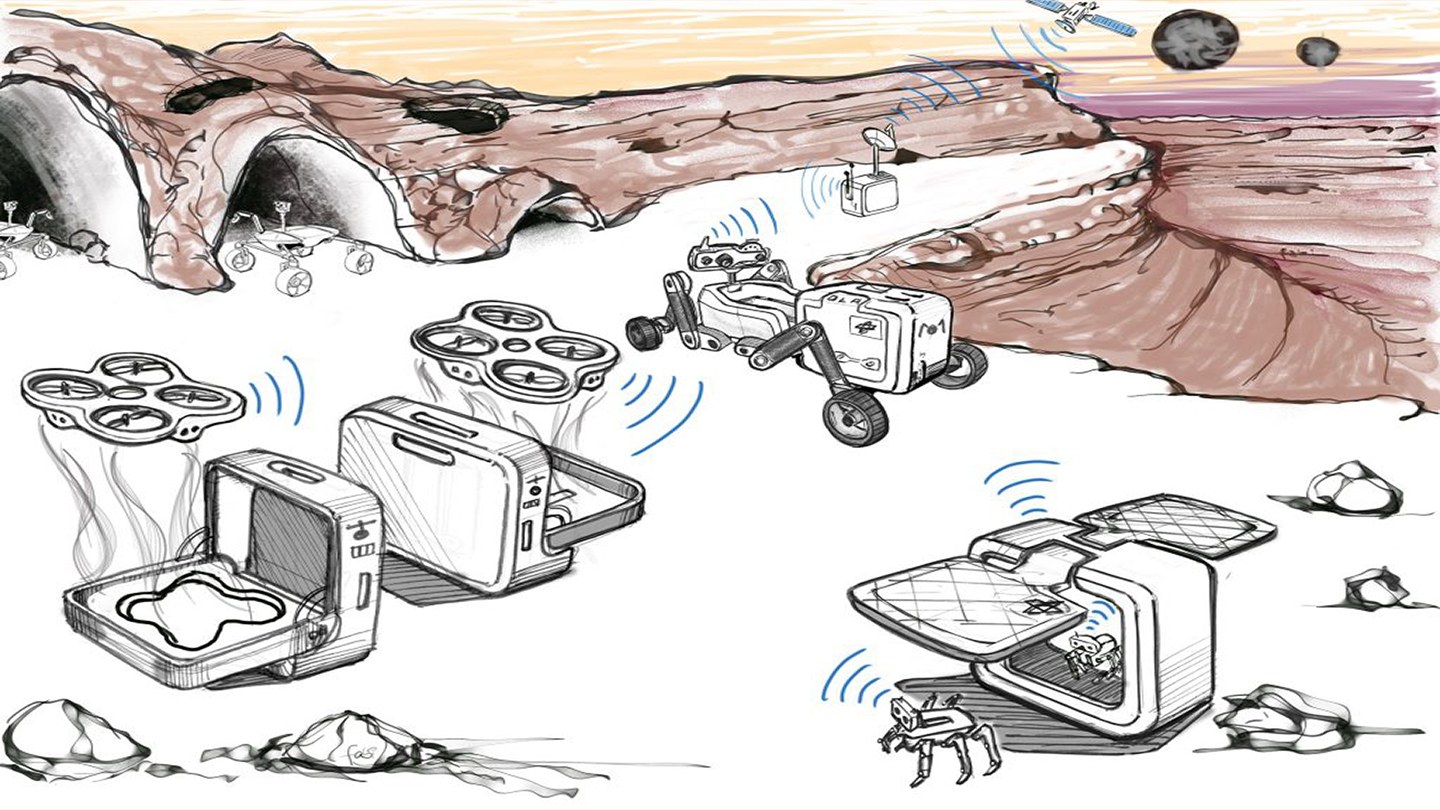
Mit Hilfe des Projekts Arches (Autonomous Robotic Networks to Help Modern Societies) werden robotische Schlüsselsysteme, etwa aus der Weltraum-Exploration, domänen- und fachübergreifend erforscht, um eine Basis zur Bewältigung gesellschaftlicher Herausforderungen zu schaffen. Im Mittelpunkt steht die Entwicklung von technologischen Grundlagen und Lösungen für anstehende gesellschaftliche Herausforderungen, bei denen ein großräumiges Monitoring sowie ein direktes Eingreifen als verlängerter Arm des Menschen notwendig sind.
Autonome, vernetzte robotische Systeme werden sowohl für die Industrie als auch für die Wissenschaft zunehmend wichtiger. Durch die gemeinsame Mission ergeben sich im Besonderen Fragestellungen der Helmholtz-Gemeinschaft, um Lösungen für strategische gesellschaftliche Herausforderungen zu entwickeln. Ob beim Systemverständnis und der Umweltüberwachung der Ozeane, der technischen Krisenintervention, dem Rückbau kerntechnischer Anlagen oder der Exploration des Sonnensystems: Nur durch den Einsatz autonomer, vernetzter robotischer Systeme wird eine kontinuierliche, langfristige und weiträumige Datenaufnahme sowie eine direkte Manipulation und Interaktion mit der Umwelt möglich. Es besteht daher die dringende Notwendigkeit, robotische Schlüsseltechnologien und -methoden zu entwickeln, die großräumiges Monitoring und Objektmanipulation in domänenübergreifenden Anwendungsfeldern ermöglichen. Mit ARCHES streben wir an, mittels eines Helmholtz-Kompetenznetzwerkes die verschiedenen und bisher noch sehr spezifischen robotischen Entwicklungen von drei Helmholtz-Forschungsbereichen (Ozean-Exploration, Abbau von Kernkraftanlagen und Weltraum-Exploration) zu vereinen und dadurch einen Technologiesprung in Deutschland und darüber hinaus zu erarbeiten.
In ARCHES soll die Roboter-Hardware eschaffen werden, welche die in allen drei Domänen charakteristisch strengen Anforderungen nach Robustheit und Zuverlässigkeit erfüllen kann. Durch die Entwicklung von konfigurierbaren Trägersystemen sowie zwischen den Domänen austauschbaren Sensor- und Manipulatormodulen wird das Ziel verfolgt, Synergiepotentiale des Kompetenznetzwerkes optimal zu nutzen. Darüber hinaus wird ein Fokus auf der Erforschung von Methoden für die gemeinsame Analyse und Interpretation von Daten durch die Roboter des Netzwerks liegen. Auch die intelligente Automation und Kooperation der Systeme werden eine zentrale Rolle spielen. Beide Aspekte sind essentiell, da die selbständige Operation des Roboternetzwerks für alle drei betrachteten Anwendungsmissionen eine Grundvoraussetzung ist. Dementsprechend ergibt sich die Motivation zur Erforschung von Ansätzen für die autonome Navigation in unbekannten Gebieten, die intelligente Interaktion mit der Umwelt, das autarke Energiemanagement und die Selbstorganisation der Kommunikation mit der Missionszentrale und innerhalb des Netzwerks. Für die Interaktion mit dem Menschen muss eine Schnittstelle für die Planung der Mission und die Organisation der Roboter geschaffen werden. Auch in diesen Punkten streben wir in ARCHES domänenübergreifend die Entwicklung gemeinsamer Lösungen und untereinander kompatibler Schnittstellen an.
Durch ARCHES entsteht zudem eine zukünftige Basis, anhand derer weitere Anwendungsfelder in Medizin und Therapie, Logistik und dem autonomen urbanen Verkehr erschlossen werden können. So kann z.B. ein autonomes Robotertransportnetzwerk langfristig dazu beitragen, die Selbstständigkeit von Individuen sowie die Mobilität und Versorgung einer zunehmend alternden Gesellschaft sicherzustellen.
Forschungsprojekt ARCHES: Erfolgreiche Mission auf hoher See
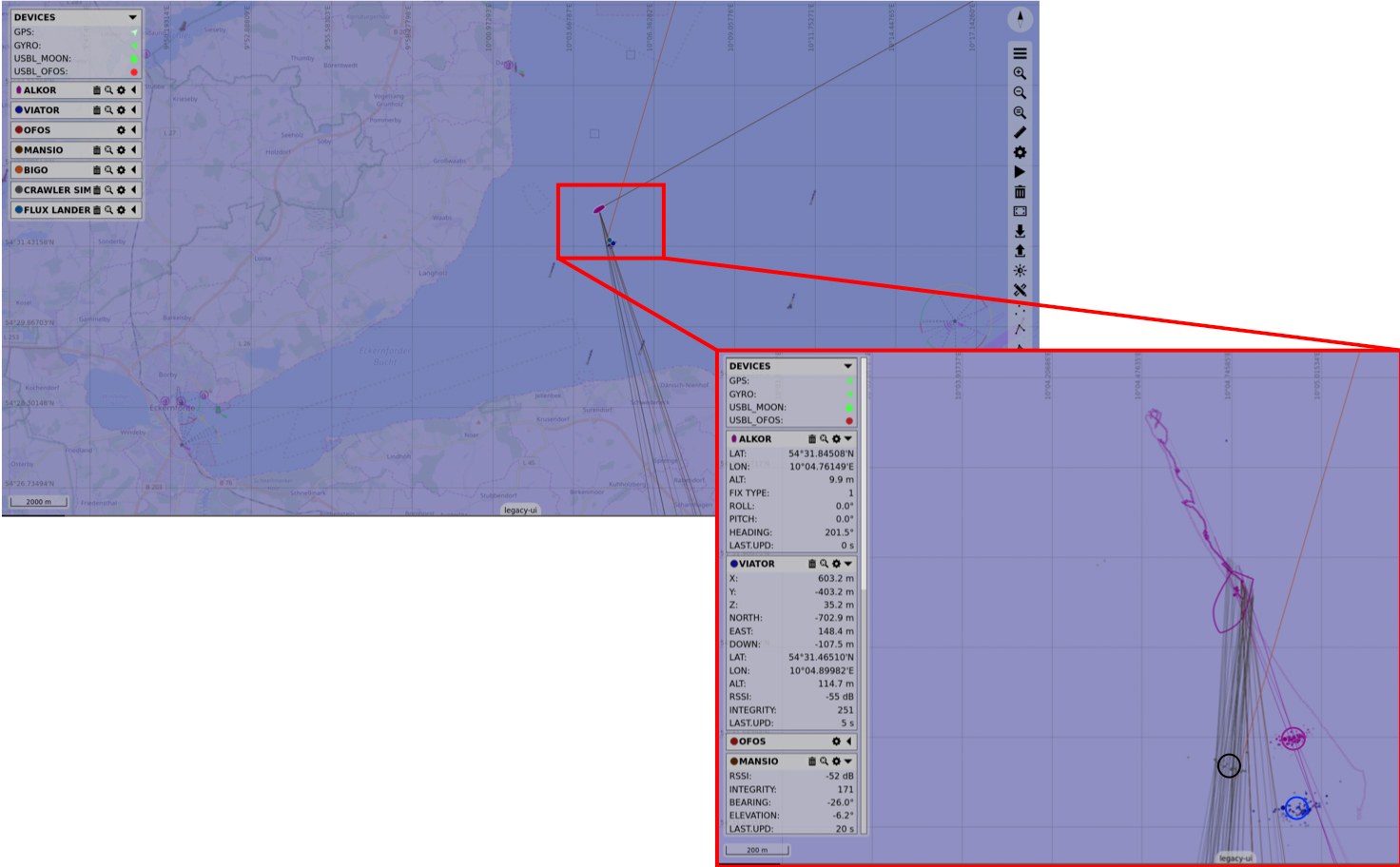
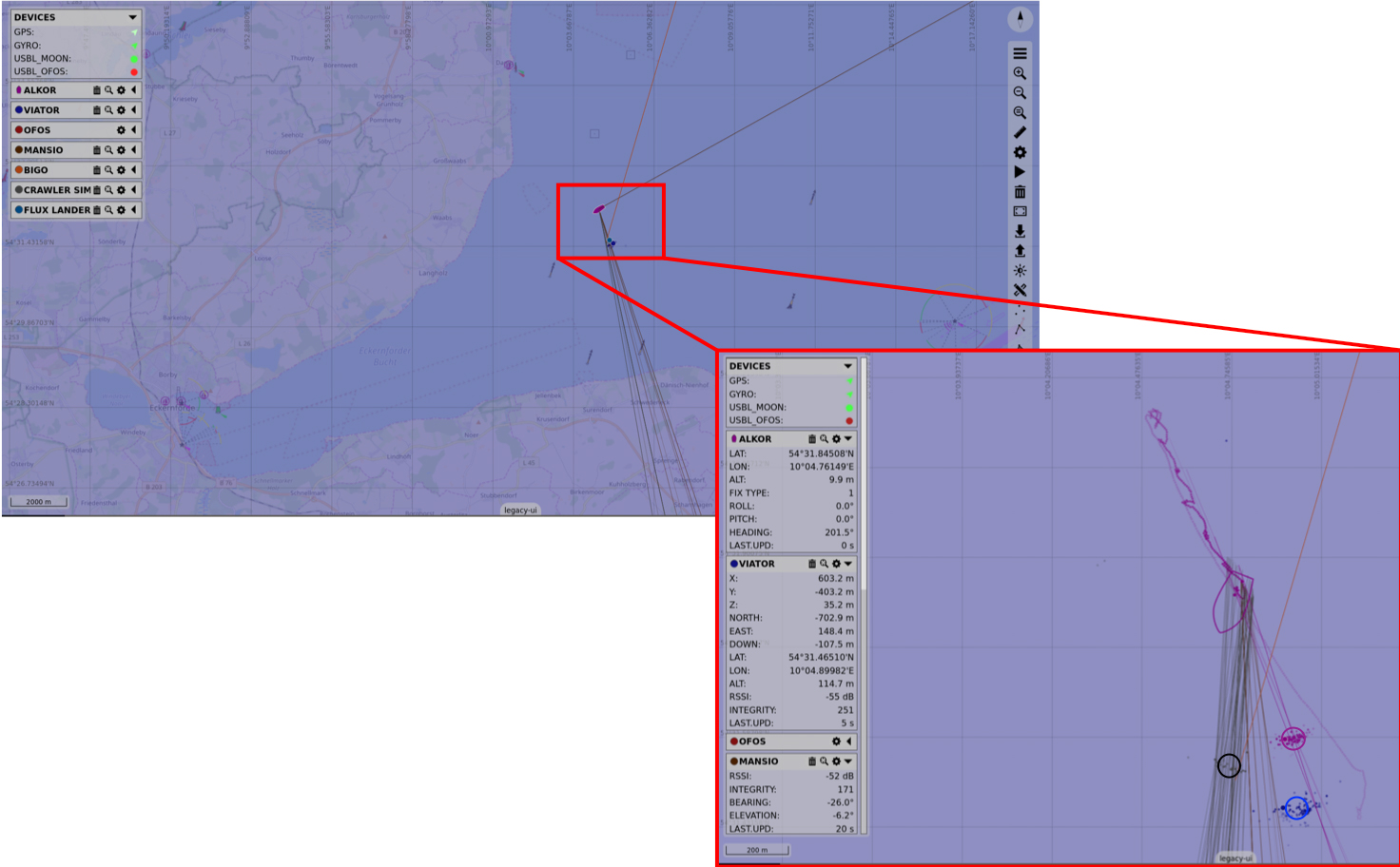
Das von der Helmholtz Gesellschaft finanzierte Zukunftsprojekt ARCHES kulminiert in dem Aufbau eines heterogenen, autonom interagierenden robotischen Netzwerks für den Unterwassereinsatz, dessen Anwendbarkeit während einer Demo-Mission im Oktober 2020 getestet wurde. Hierbei sollte gezeigt werden, dass die unterschiedlichen Messplattformen untereinander kommunizieren können und das Messnetz autonom auf Umweltänderungen reagiert und seine Messstrategie entsprechend eines vorgegebenen Protokolls ändert.



{kind=link}
{kind=link}