
DLR Laserscanner (2000)
Funktionsweise
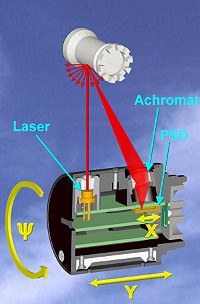
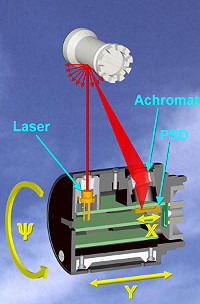
Der DLR Laser Range Scanner ist ein Gerät für die Erkundung und Untersuchung dreidimensionaler Umgebungen. Er funktioniert nach dem Prinzip der Laser-Triangulation, wie in Abb. 1 dargestellt. Ein Laserstrahl wird von einer Quelle abgestrahlt und auf der Oberfläche des abgetasteten Objekts diffus gestreut. Einige der reflektierten Strahlen treffen auf eine Linse, die das Licht auf die empfindliche Fläche eines lageempfindlichen Positionsdetektors (PSD) fokussiert. Dadurch ändert sich die Position des Brennpunkts auf dem PSD entlang des X-Maßes mit dem Einfallswinkel auf der Linse, der wiederum von der Entfernung zwischen Sensor und abgetasteter Objektoberfläche abhängt.
{kind=link}
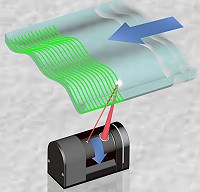
Mit dieser Methode lässt sich pro Messzyklus nur jeweils ein Entfernungswert zurzeit messen. Das System wurde durch die Einbettung des Triangulationsmoduls in ein rotierendes Bauteil weiter verbessert. So kann eine ganze 2D-Scheibe der Umgebung mit einer Messung erfasst werden.

Konstruktion/Aufbau
Das Triangulationsprinzip ist als miniaturisiertes Gerät für die Bereichsabtastung realisiert worden. Es besteht aus einem rotierenden Abtastkopf, einem Motor, einem Schrittsystem und einer Steuerbox. Auf der Abbildung ist das Gerät zu sehen. Gewicht und Abmessungen sind dem Datenblatt zu entnehmen.
Abtastkopf
Im Abtastkopf sind alle Komponenten für die Triangulation und Berechnung der Entfernungsdaten enthalten. Dazu gehören neben Laserdiodenmodul, Empfangsoptik mit achromatischer Linse und lageempfindlichem Positionsdetektor (PSD) auch die gesamte Elektronik für die Berechnung und Übertragung der Sensordaten.
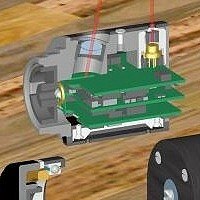
Das DLR-Laserdiodenmodul im Abtastkopf erzeugt einen Laserstrahl mit einer Wellenlänge von 670 nm. Während gewerbliche Module Abweichungen von bis zu 7° zwischen Laserstrahl und Gehäuseachse aufweisen, kann das DLR-Modul sehr präzise justiert werden. Bei einem Durchmesser von 9 mm und einer Länge von 11,5 mm erzeugt es einen Laserstrahl mit 1,2 mm Durchmesser bei 2 mrad Strahlstreuung. Die Abweichung des Laserstrahls von der Modulgehäuseachse wird auf weit unterhalb 0,1° reduziert. Die galvanisch getrennte Laserdiode ist thermisch gut mit dem Modulgehäuse gekoppelt. Der Abtastkopf dient gleichzeitig als Kühlkörper und erhöht so die Betriebszeit des Lasers. Das PSD-Signal wird durch die Elektronik im Abtastkopf verarbeitet. Bei der Entfernungsmessung sind Auflösungen bis 12 Bit erreichbar, wobei die Intensität des erfassten Lichtpunkts über ein 4-Bit-Signal (logarithmisch) übermittelt wird.
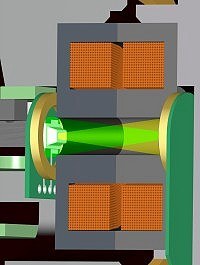
Die auf drei Platinen aufgeteilte Elektronik des Abtastkopfs steuert ebenfalls die Laserdiode, die Datenübertragung und die berührungslose, induktive Energieversorgung. Die bidirektionale Datenübermittlung für die Verbindung von Rotationsabtastkopf und Chassis wird über die LWL-Komponenten von ELCOS realisiert. Mit diesen IR-Sender/Empfänger-SMDs ist eine Übertragungsrate von 1 Mbit/s möglich. Die kontaktlose Datenübermittlung garantiert den verschleißfreien und robusten Systembetrieb. Die Energieversorgung des Abtastkopfs ist ebenfalls kontaktlos ausgeführt. Zwei in Ferritkerne eingebettete Transformatorspulen sind vis-à-vis im Abtastkopf und im Chassis verbaut. Der Luftspalt zwischen den beiden Kernen kann auf einen Wert von weit unter 0,1 mm eingestellt werden. Hier ist die montierte Einheit zur Leistungs- und Datenübertragung dargestellt.
Motor
Der Abtastkopf wird über einen modifizierten Schrittmotor von PORTESCAP angetrieben. Durch den Einsatz eines Schrittmotors ist die Drehzahl sehr schnell regelbar, indem ein optischer Teilschritt zum inkrementellen Drehwinkel der Motorsteuerung in Bezug gesetzt wird. Beim Hochlauf wird die Motordrehzahl über eine Rampenfunktion auf 1500 min-1 (25 Hz) gefahren, einer Drehzahl, bei der die Messung mit dem externen Videotakt synchronisiert werden kann. Der Motor wird an 24 Volt betrieben, während die Elektronik mit 5 V= gespeist wird.
Schritterzeugung
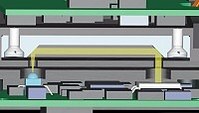
Nach dem Hochlauf dreht sich der Abtastkopf mit konstanter Drehzahl. Ein im Abtastkopf integrierter optischer Doppelspiegel dient als Referenz und reflektiert das Licht einer IR-LED auf eine Differential-Fotodiode (beide am Gestell montiert). Der Ist-Drehwinkel wird berechnet über die Dauer der vorherigen und der momentanen Rotation.
Steuerungskasten
Der Steuerungskasten enthält die Motor(an)steuerung, das CAN-Interface und einen Mikrocontroller für die Grundbedienung (z. B. Ein/Aus). Die Entfernungsdaten und der Drehwinkel werden von der Steuerung korreliert und über CAN gesendet. Zusätzlich wird der aktive Abtastwinkel angepasst. Innerhalb des möglichen Abtastwinkelbereichs von 135° können Messungen für jedes beliebige Segment programmiert werden. Die Messungen und die Laserdiode sind in den anderen Segmenten ab- bzw. ausgeschaltet. Diese Funktion ist aus Sicherheitsgründen wichtig und gewährleistet die Zuverlässigkeit der Messungen in Multi-Sensor-Systemen (z. B. bei zusätzlichen Videokameras). Der Blickwinkel (FoV) kann auf interessante Bereiche konzentriert werden. Des Weiteren verfügt die Steuerung über einen BNC-Anschluss für die Synchronisierung der Abtastzyklen mit einer externen Videoquelle.
Datenblatt
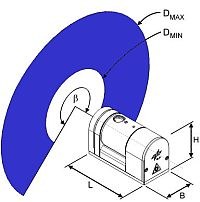
Height | H =42.0 mm |
Width | B =32.0 mm |
Length | L =75.0 mm |
Weight | G=180g |
Min. Scan Distance | DMIN=53 mm |
Max. Scan Distance | DMAX=300 mm |
Max. Scan Angle | ßMAX=270° |
Scan Angle Resolution | ? ß=0.9° |
Sampling Rate | f=10kHz |
Interface | CAN Bus |
Links
Downloads
- Scanner Data Sheet (249.3 KB)