
KineMedic (2002–2006)
Mit einem Eigengewicht von 10 kg und einer maximalen Armlänge von 1,1 m sind seine Dimensionen mit denen eines menschlichen Armes vergleichbar. Zudem sind die sieben drehmomentgeregelten Gelenke des Roboters in einem Schultergelenk (Gelenke 1–3), einem Ellenbogen (Gelenke 4 und 5) sowie einem Handgelenk (Gelenke 6 und 7) angeordnet, wobei sich die Gelenkachsen jeweils schneiden.
Durch die sieben Freiheitsgrade ist der DLR KineMedic kinematisch redundant, d.h. für eine fest vorgegebene Position und Ausrichtung des Tool Center Points kann der Ellenbogen des Roboterarmes innerhalb des Nullraumes bewegt werden. Dies erhöht die Flexibilität des Robotersystems und vereinfacht die Kollisionsvermeidung.
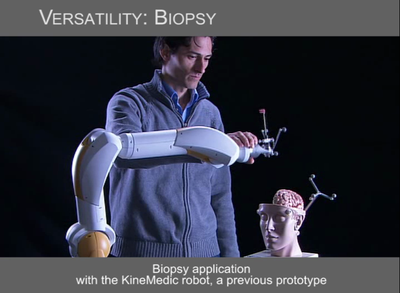
Je nach Art der medizinischen Applikation kann der Roboterarm direkt durch den Chirurgen bewegt werden (Hands-On-Steuerung), mittels haptischen Eingabegeräten von einer Chirurgenkonsole aus ferngesteuert werden oder vollkommen autonom operieren.

{kind=link}


Veröffentlichungen
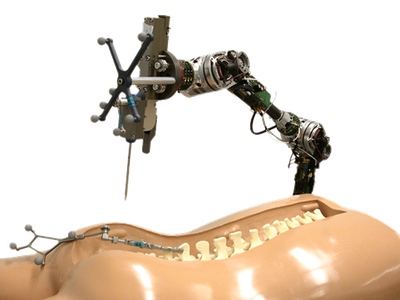
T. Ortmaier, H. Weiss, Ch. Ott, and G. Hirzinger, "A Soft Robotics Approach for Navigated Pedicle Screw Placement - first experimental results" in Proc. of the International Conference on Computer Assisted Radiology and Surgery (CARS) 2006, Osaka, Japan, 2006. elib
T. Ortmaier, H. Weiss, U. Hagn, M. Grebenstein, M. Nickl, A. Albu-Schäffer, Ch. Ott, S. Jörg, R. Konietschke, L. Le-Tien, and G. Hirzinger, "A Hands-On-Robot for Accurate Placement of Pedicle Screws", in Proc. of the IEEE International Conference on Robotics and Automation, Orlando, USA, May 2006. elib
Tobias Ortmaier, Holger Weiss, Ulrich Hagn, Markus Grebenstein, Mathias Nickl, Christian Ott, Alin Albu-Schäffer, Gerd Hirzinger, Robert Essensreiter, and Michael Bertram, "Ein neuer Roboter zum navigierten Setzen von Pedikelschrauben", in VDI Wissensforum - Mechatronik 2005, Wiesloch, Germany, June 2005, pp. 661-686. elib
H. Weiss, T. Ortmaier, and G. Hirzinger, "A New Robot for Minimally Invasive Surgery", 3. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie (CURAC), Munich, Germany, October 2004. elib
R. Konietschke, T. Ortmaier, H. Weiss, R. Engelke, and G. Hirzinger, "Optimal Design of a Medical Robot for Minimally Invasive Surgery", 2. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie (CURAC), Nuremberg, Germany, November 2003. elib
R. Konietschke, T. Ortmaier, H. Weiss, R. Engelke, and G. Hirzinger, "Link Length Optimisation of a Medical Robot in Minimally Invasive Surgery", in CARS 2003 - Computer Assisted Radiology and Surgery: Proc. of the 17th International Congress and Exhibition, London, United Kingdom, June 2003. elib