
Regelung von Leichtbaurobotern
Für die Regelung unserer Leichtbauroboter wird eine kaskadierte Struktur aus Strom-, Gelenk- und kartesischer Regelung verwendet. Die modularen Gelenkeinheiten besitzen motorseitige Positionssensoren (basierend auf dem magnetoresistiven Effekt) und abtriebsseitige Drehmomentsensoren (basierend auf Dehnmessstreifen). Zusätzliche abtriebsseitige Positionssensoren (Potentiometer) dienen zur Überprüfung und Referenzierung des Gelenks. Die innerhalb des Gelenks nahe beieinander liegenden Aktorik und Sensorik ist für die Regelung vorteilhaft und erlaubt robuste, passivitätsbasierte Regler.
Die schnellste, innerste Regelschleife ist dabei die feldorientierte PI-Stromregelung der RoboDrive BLDC Motoren. Sie läuft mit einer Taktfrequenz von 20kHz auf einem lokalen Festkomma-Prozessor in jedem Gelenk und stellt somit eine hohe Dynamik für die höheren Regler-Ebenen zur Verfügung.
Die mittlere Schicht der Kaskade übernimmt die Einzelgelenk-Regelung. Sie läuft mit einer Taktfrequenz von 3kHz auf einem lokalen Fließkomma-Prozessor in jedem Gelenk. Der Gelenkregler ist ein Zustandsregler mit den Zuständen Motorposition, Gelenkdrehmoment und deren Ableitungen. Die Rückführung der Drehmomentsignale in den Regler ermöglicht die aktive Vibrationsdämpfung der nachgiebigen Robotergelenke. Zudem können damit die Reibung und andere z.B. vom HarmonicDrive-Getriebe oder Motor verursachte Störeinflüsse beobachtet und kompensiert werden. Je nach Anwendung ist der Gelenkzustandsregler von den höheren Reglerschichten flexibel anpassbar und kann nahtlos von einem nachgiebigen Drehmomentregler bis hin zum steifen, hoch performanten Positionsregler parametriert werden.
Die Gesamtregelung des Leichtbauroboters läuft auf einem zentralen Rechner mit einer Taktfrequenz von 1kHz. Für die Auslegung der Regelung wird die Nachgiebigkeit des Systems durch den Leichtbau und die Elastizität der HarmonicDrive-Getriebe und der Drehmomentsensorik in der Modellierung berücksichtigt. Zur übergeordneten Regelung gehört die Echtzeit-Berechnung des Dynamikmodells, um die nötigen Daten für die Gelenkregelung bereitstellen zu können. Abhängig vom gewünschten Roboterverhalten adaptiert sie auch die Parametrierung des Gelenkreglers um die Performanz der Positionsregelung zu optimieren oder implementiert auch nachgiebiges Verhalten, wie z.B. einen kartesischen Impedanzregler.

In Anwendungen werden üblicherweise folgende Reglertypen verwendet:
- Gravitationskompensation – reine Drehmomentregelung auf Gelenk-Ebene mit Kompensation der Gravitationsterme. Diese Betriebsart sorgt für komplette Nachgiebigkeit des Roboters und erlaubt dem Anwender somit eine intuitive Positionierung des Roboters im gesamten Arbeitsraum, um z.B. Posen für spätere Anwendungen zu programmieren.
- Positionsregelung – Rückführung aller Zustände im Gelenkregler für hochdynamische Bewegungen im freien Raum, z.B. für Transferbewegungen bei industriellen Pick-and-Place-Aufgaben. Der Regler enthält auch einen integralen Anteil um hohe Genauigkeit zu erreichen. Die Rückführung des Drehmomentsignals erlaubt die Dämpfung von unerwünschten Schwingungen der Leichtbau-Struktur. Die Verstärkungen des Reglers werden konfigurationsabhängig während des Betriebes angepasst.
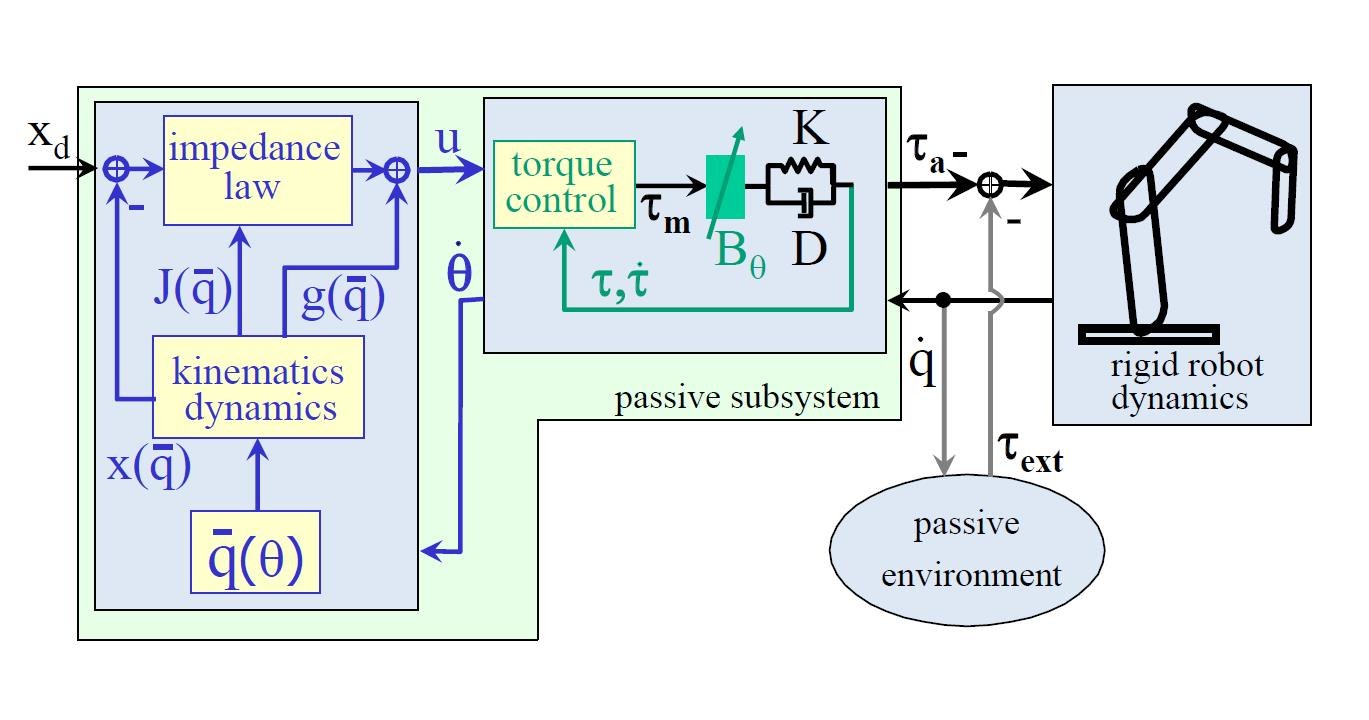
- Kartesische Impedanzregelung – ein Regler im kartesischen Raum, der das Verhalten eines mehrdimensionalen Feder-Dämpfer-Masse-Systems mit wählbarer Steifigkeit und Dämpfung nachbildet. Im Gegensatz zu normalen admittanzgeregelten Industrierobotern erlaubt die robuste passivitätsbasierte Implementierung bei unseren Leichtbaurobotern eine hohe Bandbreite von gewünschten Steifigkeiten bis hinab zur kompletten Nachgiebigkeit und garantiert auch bei harten Kontakten und Kontaktübergängen ein stabiles Verhalten. Diese Betriebsart wird vornehmlich für alle Bewegungen in Kontakt mit der Umgebung genutzt, um beispielsweise Kräfte auf Werkstücke auszuüben oder Bauteile bei industriellen Montageanwendungen aneinander auszurichten.
Die genaue Kenntnis des Dynamikmodells und die Verfügbarkeit der Drehmomentmessungen in den Gelenken erlauben zudem die Berechnung der Interaktionskräfte mit der Umgebung und damit auch eine feinfühlige Erkennung von ungewünschten Kollisionen. Da die Regler-Betriebsart innerhalb eines Regeltaktes gewechselt werden kann (innerhalb von 1ms) ist eine sofortige Reaktion auf Kollisionen mit der Umgebung möglich. Dadurch vereint der Leichtbauroboter die Vorteile von hochperformanter Positionsregelung in industrieller Umgebung auf der einen Seite und feinfühliges, nachgiebiges Verhalten in Montageanwendungen und bei physikalischer Mensch-Roboter-Interaktion auf der anderen Seite.
Veröffentlichungen
[1] A. Albu-Schäffer, C. Ott and G. Hirzinger, “A unified passivity based control framework for position, torque and impedance control of flexible joint robots”, International Journal of Robotics Research, vol. 26, no. 1, pp. 23-39, 2007
[2] A. Albu-Schäffer, S. Haddadin, C. Ott, A. Stemmer, T. Wimböck and G. Hirzinger, “The DLR lightweight robot, design and control concepts for robots in human environments”, Industrial Robot – an international journal, vol. 34, no. 5, pp. 376-385, 2007