
OLEV
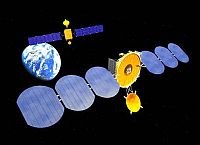

OLEV approaching a telecommunication satellite
Credit:

OLEV docked with its parent telecommunication satellite (pictures by courtesy of Orbital Recovery Corp.)
Credit:
It seems that with our capture tool and docking technology as developed for ESS, we might create the first business case in on-orbit-servicing. Telecommunication satellites typically cost at least $250 million and are designed for an average on-orbit life-time of 10-15 years. Once their on-board propellant load is depleted, the satellites are boosted into a disposal orbit and decommissioned, even though their revenue-generating communications relay payloads continue to function. The OLEV (Orbitl Life Extension Vehicle) will significantly prolong the operating lifetimes of valuable telecommunication satellites. |
OLEV will operate as an orbital tugboat, supplying the propulsion, navigation and guidance to keep a telecommunications satellite in its proper orbital slot for many additional years. Another application of the OLEV could be the rescue of a spacecraft that has been placed in a wrong orbit by its launch vehicle, or which has stranded in an incorrect orbital location during positioning manoeuvres. The system is designed to easily mate with all current and future telecommunications satellites. It will link up using our proprietary docking device (the modified ESS capture tool, see Fig. below) that connects to the telecommunication satellite's apogee kick motor, as we have proposed within the ESS technology study. Meanwhile we have made a lot of effort to redesign the capture tool towards increasing its fail-safe behaviour, e.g., by using additional redundant sensors. |
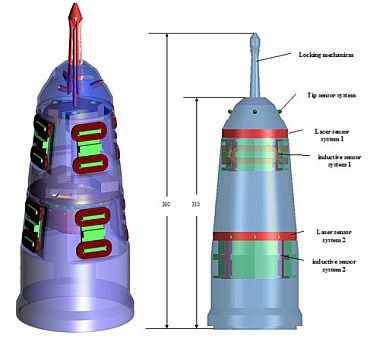
The modified capture tool with redundant sensor systems.
Credit:
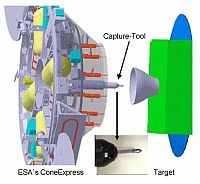
Satellite capturing – the OLEV system
Credit:

The simulated close approach phase
Credit: