
Motion Parameter Estimation for a Tumbling Satellite using a Model Based Approach
In this section a brief overview of the methodology considered for the motion parameter estimation for a tumbling satellite is described.
The problem consists in deriving a method for motion parameter estimation of a target by observation. This is intended for supporting a predictive simulation for the planning of a grasping sequence of the tumbling target. The position of the grasping point on the target as a function of time is unknown and must be derived from identification. The results of the identification must be accurate enough to allow for planning and execution within the limits of the robustness of a tracking controller.
The approaches being considered are the following:
- Function approximation of the measured spacecraft states
- Model based parameter identification of a spacecraft dynamic model
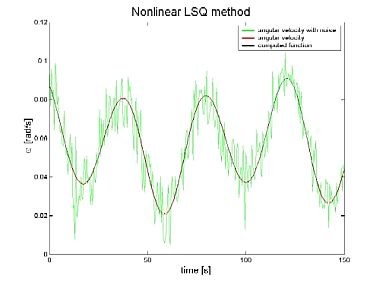

The latter point entails implementation of both linear as well as nonlinear least-squares methods, to account for non-linear inequality and normalization equality constraints.