A nationally funded study was initiated in 1999 to design a servicing satellite for operations in low earth orbit (LEO). The background was to rescue the scientific satellite ROSAT (a German Röntgen satellite launched in 1991), that was built without having any thrusters for controlled de-orbiting. This satellite is expected to de-orbit in an uncontrolled manner between 2005 and 2008.
Our main tasks in the de-orbiting study ESS-OSS (ESS-Operational Servicing Satellite) were:
to identify successful capturing and de-orbiting strategies with robotics;
to develop a mission control concept and a cost estimation.
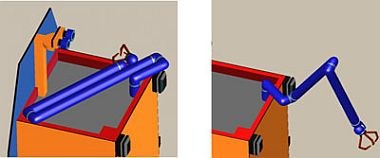
The Manipulator’s final design in stowed position (left) and unfolded (right)