
LBR III

Größe: | Maximale Reichweite 936 mm |
Gewicht: | 14 kg |
Freiheitsgrade: | 7 (R - K - R - K - R - K - K) |
Maximale Nutzlast: | 14 kg |
Max. Gelenkgeschwindigkeit: | 120°/s |
Regelung: | Positions-, Drehmomenten-, Impedanzregelung |
Besonderheiten: |
|



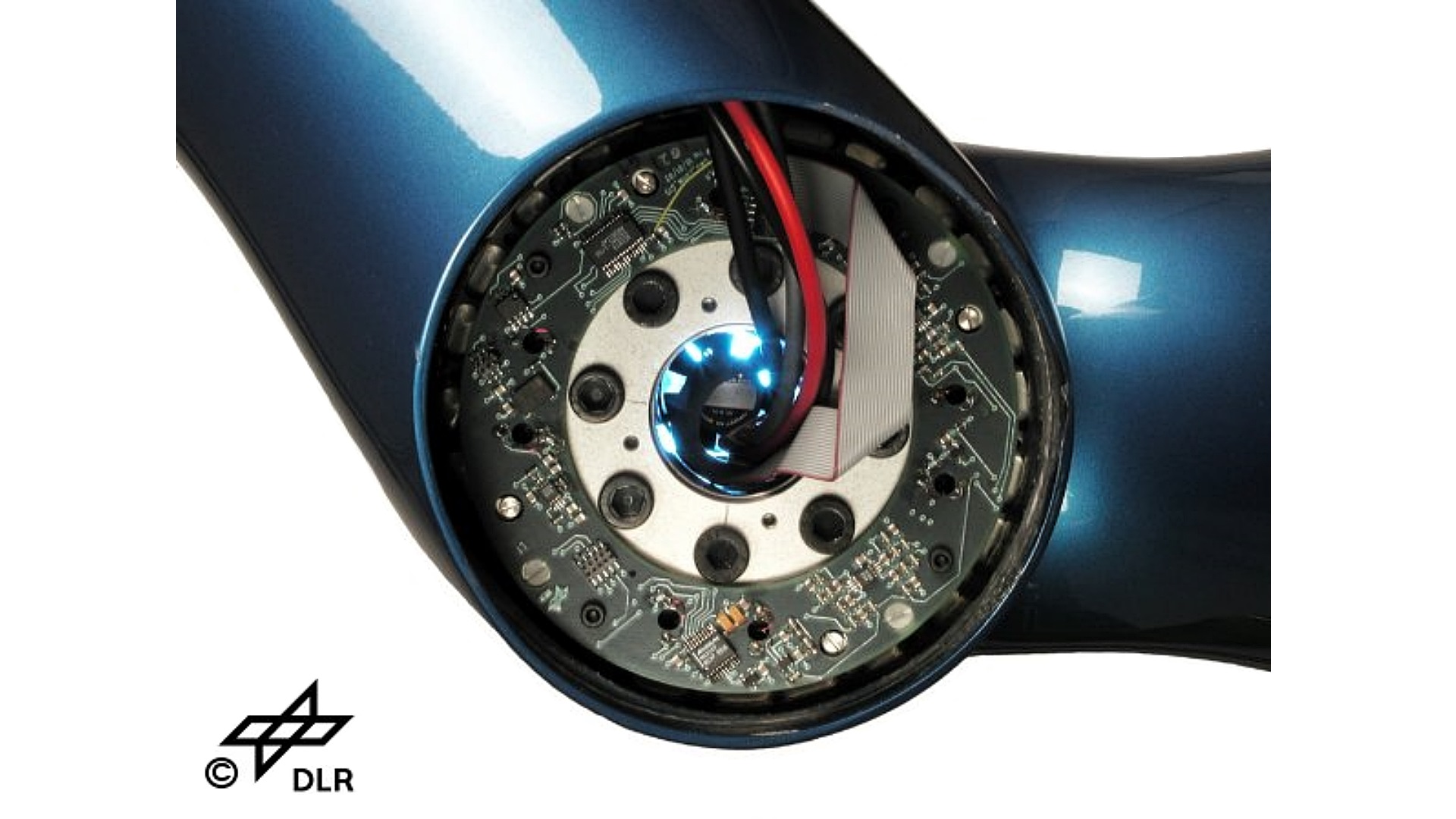
Gelenk des LBR III
Bei geöffnetem Gehäuse zeigt sich die kompakte Bauweise der Gelenkmodule.

LBR III mit DLR Hand II
Dank seines Werkzeugflansches kann der LBR III mit verschiedenen Endeffektoren ausgestattet werden wie hier mit der DLR Hand II.

{kind=link}
{kind=link}
{kind=link}
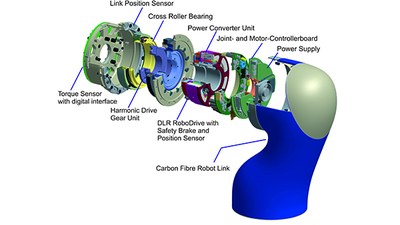
CAD-Rendering des LBR III
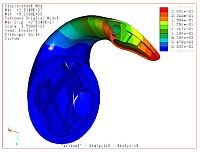
Ansicht des LBR III von der rechten Seite
{kind=link}