
ROBEX Part 4: Ash, beetles and blustering winds


Dust is inescapable after four weeks of field research on Mount Etna: a tenaciously fine layer covers everything: equipment, transport crates and notebook keypads. It penetrates the mission container and sticks to hands and legs lathered in sunscreen. Every step in the black lava soil kicks up clouds of dust. Even the white body of the LRU-2 Rover is coated in black deposits. A small mercy is that the last few days have seen significantly fewer flies and beetles buzzing around Mount Etna who, despite the gaunt landscape, insistently settle on the jackets and hats of the ROBEX team members.
After all, Mount Etna is not a conventional laboratory and remains unpredictable. Gusts of wind up to 100 kilometres an hour pummel the mountain on Thursday, carrying with it not only dust but heavy rocks, putting a stop to any work with the Rover – the force of the wind against the Rover's body and arm would simply be too great and could well have damaged it. The lander is also packed away safely, the flaps on its charging port not just folded down, but securely strapped in place. Finally, the engineers face the battering wind to remove the signs on the lander that the Rover uses as points of orientation during its approach.
A headstrong Rover
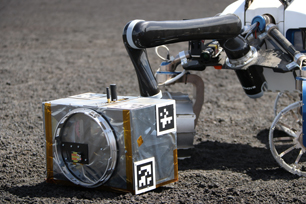
The ROBEX team spent the previous days working from dawn to dusk on the test grounds, putting the Rover through a sheer endless cycle of individual sequences. They studied each autonomous manoeuvre step-for-step, before performing the whole self-steering circuit one final time. They sent the Rover off by itself to find the lander, used its arm to reach for a sensor unit to take it to a predefined position and then deposit it there to conduct measurements. Everything needs to work like clockwork: Rover LRU-2 needs to use its camera view to create a map, select a route without obstacles, communicate with the lander and the sensor unit, use their markings as points of orientation, align itself, plan its arm movements and dock to the unit, and much more.
Tougher conditions on Earth
The Rover stops repeatedly during its mission – almost like a thoughtful person. Ultimately, this is precisely what is going on in its computerised brain. To drive safely, it updates the map with each glance at its surroundings. And the fact that it is not in a laboratory, but on a real scenario on Mount Etna, does not make things easier: the weight of the sensor units, for instance, would be negligible on the Moon – but their three kilograms in Earth’s gravity pose quite a challenge. The terrestrial winds that swirl repeatedly around the Rover, pressing against its arm, also cost the vehicle a lot of energy – a problem that would not exist on the wind-free Moon.
The batteries normally last around one hour, but after moving uphill for half an hour towards base camp, the gauge is empty and the Rover’s batteries need to be replaced. Bernhard Rebele repeatedly trudges the 80 metres up to base camp to retrieve the next charged battery. On a lunar mission, scientists would simply give the Rover more time and configure slower movements that would cost significantly less energy. So, even if Mount Etna is the perfect lunar landscape for a demonstration mission – it is nevertheless unable to provide the aerospace specialists with microgravity, no wind and other important factors.
Team success for Rover, lander and control centre
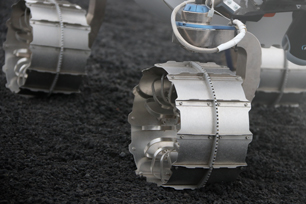
The mission is successful nonetheless: receiving its commands from the control centre in Catania, located 23 kilometres away as the crow flies, the Rover completes its tasks with increasingly confidence. The metal wheels crunch noisily across the uneven terrain as the Rover approaches the lander. All the while, the Rover, lander and sensor unit use a link to share information and data. The mission can only be autonomous – without real-time commands by the control centre – if communication works smoothly. Rover LRU-2 places the unit on its back in regular, orderly movements. On reaching its goal, it lifts the unit carefully back out of its 'luggage rack', uses it to smooth the granular lava soil and then places it down as flush as possible on the ground.
The ROBEX team will move onto new tasks on Monday: Rover LRU-2 and the lander RODIN will be stowed away safely in their transport containers. The control centre on Etna and its antennas will be dismantled. And soon only the ruts that the LRU-2 etched into the ground will remain. Mind you, these are reminiscent of the footprints and Rover tracks left behind on the Moon by the Apollo missions.
Take a look around: the #ROBEX rovers find their way autonomously - even through tough terrain. More: https://t.co/f3ycQYRaSr pic.twitter.com/tKdDLK4jqB
— DLR - English (@DLR_en) 1 juli 2017
Tags: