
ROKVISS Results
Successful premiere – German robotic arm completes its five-year ISS mission
Germany's first experiment in space robotics has now come to an end. On the evening of 15 November 2010, two Russian cosmonauts performed a space walk during which they removed the Rokviss robotic arm developed by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) from the experimental platform on the Russian service module Svezda and took it inside the ISS. By 2 November 2010, the Rokviss team from the DLR Robotics and Mechatronics Center in Oberpfaffenhofen had moved the robot arm into the required position for this operation. Only in this position could Rokviss be easily transported through the air lock and into the interior of the ISS.
The technology experiment was controlled either fully automatically or by means of a technique known as telepresence operation – remote control by the DLR Rokviss project team based in Oberpfaffenhofen. Four to six times a month, the researchers established contact with the robot arm, whenever the ISS passed over the reception area of the antenna system at the DLR facility in Weilheim, near Oberpfaffenhofen, thereby making the transfer of data possible. The data transfer was performed via a dedicated communication unit (CUP = Communication Unit for Payloads). This system enabled the team to operate the ROKVISS in force-feedback mode (tele-presence) with a round trip time delay of less than 30 ms. The system was designed and manufactured by STT-Systemtechnik GmbH. The CUP was not dismounted from the ISS, it will be used for upcoming experiments.
The aim of the experiment was to test and verify new hardware and powerful robot control concepts during real mission operations. In future, this technology will support astronauts and lighten their workload during complex tasks, and it will also help to repair satellites in orbit. Conditions in space are radically different from those on Earth; there is no air and temperatures inside the robot joints range from minus 20 to plus 60 degrees Celsius.
However, removal of Rokviss from the ISS does not complete the work of the DLR researchers. By March 2011, the two joint units are to be unfastened from their baseplate and the camera unit is also scheduled for disassembly. This is the only way to get the joints to fit in the small storage space available on the Soyuz capsule in which they are to be returned to Earth. By the mid of June 2011, project manager Klaus Landzettel and his colleagues expect Rokviss to be back in the DLR Robotics and Mechatronics Center in Oberpfaffenhofen. Then, by carefully examining the extent of the mechanical wear, further essential information can be obtained and then applied for future space robots.
ROKVISS Experiment Results
Within approx. 6 years of operation (since March 2005) we successfully performed over 500 experiments.
Due to the ISS computer-problems, as occured in summer 2007, ROKVISS was forced to go into a five month lasting operational pause. In October 2007 the robotic system was reactivated without any measurable impairment. The joints performed their commanded operation very smoothly. The system is in a very good shape and it operates very reliable!
Operation via Internet in Cooperation with the Institute for Robotics and Technical Cybernetics in Saint Petersburg:
With the beginning of 2009 a cooperation between DLR-RM and the Institute for Robotics and Technical Cybernetics-(RTC in St.-Petersburg, Russia) was started. The near term goal of this cooperation is to operate the ROKVISS flight hardware via internet (see Website of RKK). DLR-RM developed a program wich allows to control the ROKVISS system with a spacemouse from any location on the world providing network access. End of April 2009 the first experiment via internet with the flight hardware was conducted from the project managers home office via an ordinary DSL (3MBit/s) network. The command- and telemetry data between the remote station and the ROKVISS ground control station at DLR were transfrerred with a measured round trip time of <80 ms and an overal bandwidth of ~ 16 kBit/s. Beside these robot data, the realtime video data stream from the ROKVISS flight system was received at the remote control station in good quality.
In September 2009 the colleagues from RTC performed their first teleoperation experiment via internet, using DLR's program as described above!
Meanwhile a tele-presence remote control station is under development at DLR-RM. First tests with a data mirror at RTC have shown that the tele-presence control - with a joystick providing force feedback - is feasible with very good performance at round trip times of approx. 80 ms.
Tele-presence Results
Already during the first mission contacts tele-presence experiments have been conducted. It turned out, that the overall round trip time for the tele-presence experiments is below 20ms. The experiments in tele-presence mode are very reliable with a high fidelity force feedback impression for the ground operator. This operational mode is a very good means for On Orbit Servicing (OOS) missions whereas the operator has to react immediately, based on the feedback information (video and force/torque). The stereo video transmission provides a realistic 3D imagery of the scene, though only as grey image. The presence feeling was improved by the realistic force-feedback provided by the DLR-Joystick.
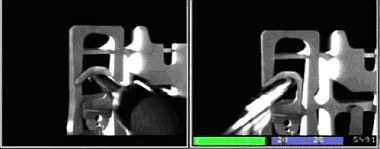

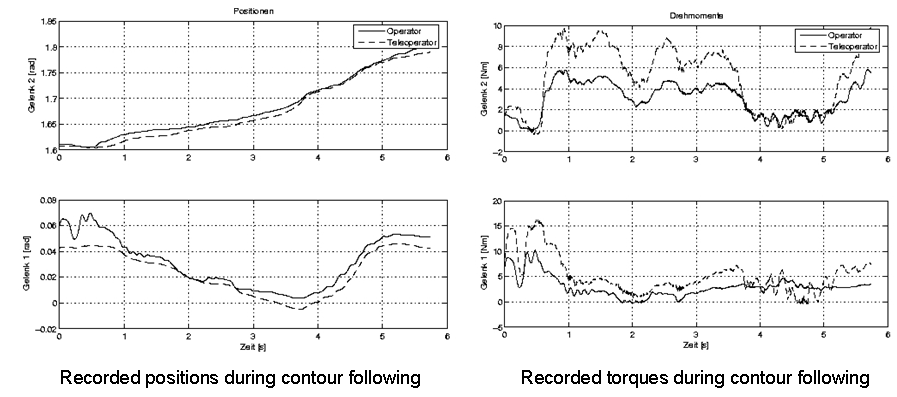
Position and force values as recorded during a contour-following experiment are shown below. A good position-following of the slave system and a scaled but identical force trajectory was felt by the operator. Additional experiments with the different control architectures will follow.
{kind=link}
Results concerning the JOINTS:
Time and Temperature Dependency
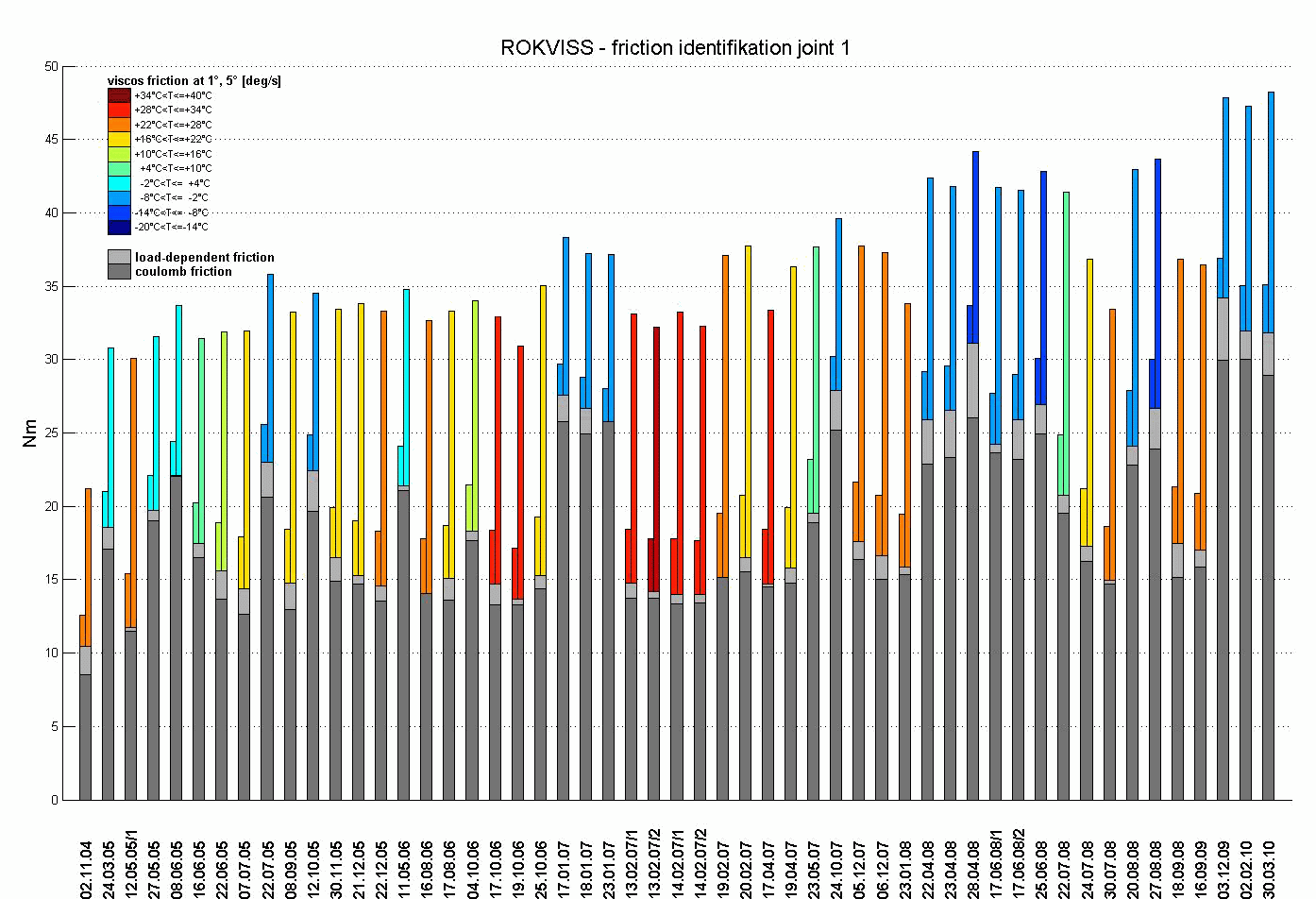
The results of the on-orbit identification show that the total friction for joint 1 in space increased by a factor of about 50% compared to the friction on ground, taken at 20°C, under normal atmospheric pressure. However, only small further continuous change of the parameters can be observed so far over the first year of operation (see figure below). This suggests the conclusion that the lubricant changed its properties when exposed to outer space conditions at the beginning of the mission and afterwards reached an operating state with slow parameter variation.
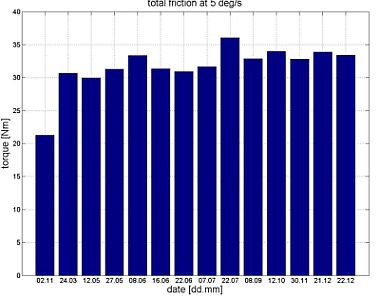
Recent friction identification results of the two joints are shown below:

Stiffness Identification
The main sources of elasticity in the joints are the flex splines of the harmonic drives and the torque sensors. The elasticity is identified by contacting a rigid surface with the tip of the robot and commanding a slowly changing force to the joints. Since the torque is measured after the gear-box, the stiffness can be easily optimized with the available torque and position signal. A typical identification result can be seen in the figure below. The stiffness for both joints has values around 5000 Nm/rad. As expected, the first measurements revealed no significant differences between the stiffness values on ground and in space.

More detailed experiment results are presented in publications (see right side).
Links
Downloads
- ASTRA 2006, Verification of Advanced Light Weight Robotic Joints and Tele-Presence Concepts for Future Space Missions (1.5 MB)
- ASTRA 2006, Robotic Joints and Contact Dynamics Experiments (627.5 KB)
- ICRA 2006, ROKVISS Current Experimental Results on Parameter Identification (789.4 KB)
- IROS 2006, Robotic On Orbit Servicing Experience (1.1 MB)
- IROS 2006, ROKVISS Preliminary Results for Telepresence (926.6 KB)
- iSAIRAS 2005, ROKVISS Space Robotics (1.5 MB)
- ROKVISS documentation Realplayer (12MB) (12.0 MB)
- ROKVISS documentation Realplayer (7MB) (7.0 MB)
- Tele-presence demo Realplayer (0.2MB) (219.6 KB)