
Verkehrserfassung mit der Satellitenformation
Die bei SRTM und TerraSAR-X verwendeten Verkehrsprozessoren hatten und haben jedoch einige erhebliche Einschränkungen: Man benötigt zur Bestimmung der Fahrzeuggeschwindigkeiten und geografischen Fahrzeugpositionen auf jeden Fall eine Straßendatenbank. Fahrzeuge, die im freien Gelände oder auf nicht verzeichneten Straßen unterwegs sind, können nicht zuverlässig erfasst werden. Probleme bereiten auch Gebiete, in denen viele "parallele" Straßen vorhanden sind. Für den Verkehrsprozessor für die TerraSAR-X-/TanDEM-X-Satelliten-Konstellation bestehen die zuvor genannten Einschränkungen nicht. Es wird keine Straßendatenbank und auch kein sonstiges Vorwissen benötigt. Fahrzeuge im Gelände und auch Schiffe auf hoher See können eindeutig und mit hoher Genauigkeit erfasst werden.
Der entwickelte Verkehrsprozessor kombiniert die mit TerraSAR-X und TanDEM-X zu leicht unterschiedlichen Zeitpunkten aufgezeichneten Daten miteinander. Um die beste Performance zu erreichen, ist ein Abstand der beiden Satelliten von etwa 20 Kilometer erforderlich. Für die Demonstration der Leistungsfähigkeit des Verkehrsprozessors kam uns daher die "Commissioning Phase" von TanDEM-X gerade recht: Hatten die beiden Satelliten doch genau diese 20 Kilometer Abstand, bevor sie in die enge Formation geführt wurden.
Wie unterscheidet das Radar zwischen stillstehenden und bewegten Objekten?
Aus "Radar-Sicht" unterscheiden sich bewegte Objekte von stillstehenden Objekten vor allem durch ihre unterschiedliche Dopplerfrequenz (= Veränderung der Frequenz von Wellen, wenn sich der Abstand zwischen Radar und beobachteten Objekt verändert), die proportional zur Geschwindigkeit ist. Aufgrund dieses Dopplerfrequenzunterschiedes werden bewegte Objekte im Radarbild nicht an deren tatsächlichen Positionen abgebildet, sondern versetzt davon.
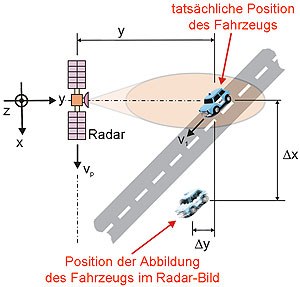

Fahrzeuge befinden sich somit nicht auf den Straßen, wo man sie eigentlich erwarten würde, sondern vielmehr fernab davon - "quasi im Straßengraben!", könnte manch einer im ersten Moment mutmaßen. Nun, dieser "Straßengraben" kann in der Tat mehrere hundert Meter von der eigentlichen Straße entfernt sein, je nach Geschwindigkeit der Fahrzeuge. Die Bestimmung der tatsächlichen Fahrzeugpositionen und die eindeutige Zuordnung der Fahrzeuge zu den jeweiligen Straßen können also sehr schwierig sein. Hier kommt der Verkehrsprozessor ins Spiel. Seine Aufgabe ist es, die Fahrzeuge zu erkennen (zu detektieren) und deren tatsächliche Positionen und Geschwindigkeiten mit hoher Genauigkeit zu bestimmen.
Wie wurden die Fahrzeugpositionen und Geschwindigkeiten bisher mit dem einzelnen TerraSAR-X-Satelliten gemessen?
Hat man nur einen einzelnen TerraSAR-X-Satelliten zur Verfügung, so muss sich der Verkehrsprozessor eines Tricks bedienen: Er muss wissen, wo genau im Radarbild sich die Straßen befinden. Der Versatz und somit die tatsächliche Position jedes Fahrzeugs können dann direkt gemessen und die dazu proportionale Geschwindigkeit berechnet werden. Probleme gibt es unter anderem, wie bereits erwähnt, in dicht besiedelten Gebieten mit vielen "parallelen" Straßen, wo die Fahrzeuge nicht mehr eindeutig einer Straße zugeordnet werden können. Wird nur die interferometrische Phase zwischen den beiden Antennenhälften von TerraSAR-X zur Positionsbestimmung ausgewertet, so kann der Positionsfehler im schlimmsten Fall "mehrere hundert Meter" betragen. Die Hauptgründe dafür sind das Phasenrauschen und Interferenzen von stillstehenden Objekten.
Nach welchem Prinzip funktioniert der neue, leistungsfähigere TerraSAR-X-/TanDEM-X-Verkehrsprozessor?
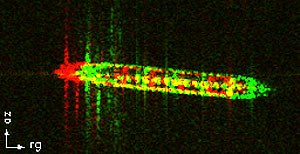
Wird ein und dasselbe Gebiet von TerraSAR-X und kurze Zeit später von TanDEM-X aufgenommen (oder umgekehrt), dann erscheinen die bewegten Objekte wiederum in beiden Radarbildern versetzt von deren tatsächlichen Positionen. Ein- und dasselbe Fahrzeug bzw. Schiff wird jedoch in beiden Radarbildern an unterschiedlichen "falschen" Positionen abgebildet, da es sich zwischen den beiden Satelliten-Aufnahmen bewegt hat, also seine tatsächliche Position verändert hat. Der Abbildungsunterschied kann, je nach Geschwindigkeit und je nach Abstand zwischen den Satelliten, mehrere "Pixel" betragen. Im Bild wurde die TerraSAR-X-Aufnahme (rot) mit dem TanDEM-X-Radarbild (grün) überlagert. Das Schiff hat sich zwischen den beiden Aufnahmen nach rechts unten bewegt.
Dieser Abbildungsunterschied kann sehr genau gemessen werden. Daraus lassen sich dann eindeutig die tatsächliche geografische Fahrzeugposition, die Geschwindigkeit, die Fahrtrichtung und sogar die Beschleunigung des Fahrzeugs bzw. Schiffs berechnen.
Erste vorläufige Ergebnisse aus der "Commissioning Phase" belegen, dass der Geschwindigkeitsschätzfehler im Mittel besser als 1 km/h ist und der mittlere Positionsschätzfehler in der Größenordnung von 20 Metern liegt. Diese Werte sind schon beeindruckend, erreicht man doch bis dato mit keinem anderen Radarsatellitensystem diese Genauigkeiten, schon gar nicht ohne Vorwissen bzw. die Verwendung einer Straßendatenbank!
Klar, um die Aussagen in puncto Schätzgenauigkeit statistisch zu untermauern, müssen in den nächsten Wochen noch einige Commissioning-Phase-Aufnahmen ausgewertet und auch der Verkehrsprozessor noch optimiert werden. Erst dann ist die Verifizierung des Verkehrsprozessors abgeschlossen.
Was genau liefert der neue Verkehrsprozessor als Output?
Der Verkehrsprozessor funktioniert automatisch und liefert als Output eine sogenannte KML-Datei (Keyhole Markup Language). Diese Datei kann mit Google Earth visualisiert werden. Das vorläufige Endprodukt aus einer Schiffsbeobachtung in der Straße von Gibraltar ist Abbildung 3 zu sehen (natürlich können Straßenfahrzeuge auf dieselbe Art und Weise dargestellt werden). Die erfassten Schiffe sind darin als farbige Symbole dargestellt. Die Positionen der Symbole entsprechen den tatsächlichen geografischen Schiffspositionen. Werden die einzelnen Symbole vom Benutzer angeklickt, so öffnet sich ein Fenster mit allen relevanten Informationen über das jeweilig detektierte Schiff (siehe linke Seite von Abbildung 3). Im konkreten Beispiel sind auch die Informationen über die AIS-Referenzdaten (Automatic Identification System), die zur Verifizierung des Verkehrsprozessors dienen, mit eingeblendet. Neben KML stehen natürlich noch weiter Ausgabeformate zur Verfügung, die eine weiterführende, automatisierte Verkehrsauswertung und Datenaufbereitung zulassen, beispielsweise durch ein "Traffic Management Center".
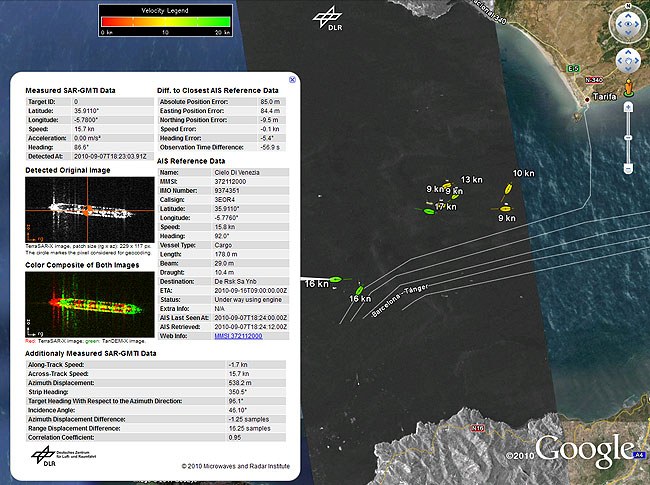
Ergebnis einer Schiffsbeobachtung in der Straße von Gibraltar. Die erfassten Schiffe sind als farbige Symbole dargestellt (die Positionen der Symbole entsprechen der tatsächlichen Schiffspositionen). Versetzt von diesen Symbolen, im Abstand von bis zu 550 Metern, sind die "weißen" Radar-Abbildungen der Schiffe zu erkennen, die sich an den "falschen" Positionen befinden.
Die Vorprozessierung der Radardaten von TerraSAR-X und TanDEM-X wurde mit dem am Institut für Hochfrequenztechnik und Radarsysteme entwickelten, flexibel einsetzbaren TAXI-Prozessor (Experimental TanDEM-X Interferometric Processor) durchgeführt. Für die Verifizierung des Verkehrsprozessors wurden AIS-Daten verwendet, die freundlicherweise von Stephan Brusch und Susanne Lehner vom Institut für Methodik der Fernerkundung zur Verfügung gestellt wurden.
Tags: