
Schritt für Schritt zum fertigen Asteroidenlander


Nach all den Tests und Entwicklungsarbeiten im vergangenen Jahr ist es ein unglaubliches Gefühl nun das finale Modul fertig zu stellen, welches auch schon bald auf seine lange Mission geschickt wird. Für das Integrationsteam ist es definitiv eines der Highlights im gesamten Projekt. Aber drehen wir die Zeit noch mal ein paar Wochen zurück und schauen uns rückblickend an, wie das MASCOT Flugmodell zum Leben erwachte!
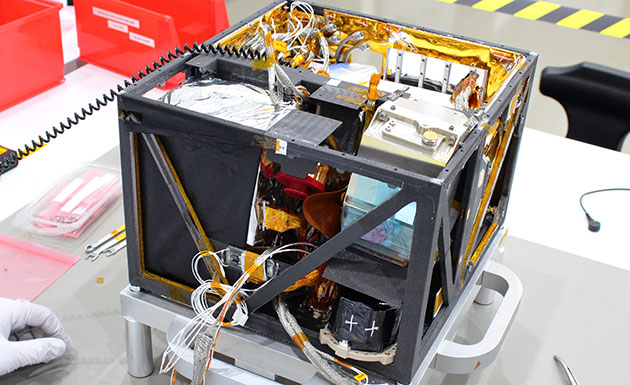
Am Anfang steht die leere Primärstruktur, die uns neben den nötigen Anschraubpunkten auch den äußeren Rahmen vorgibt. Sie wurde von unseren Kollegen aus Braunschweig vom DLR-Institut für Faserverbundleichtbau und Adaptronik in liebevoller Hand- und Maßarbeit in einem aufwendigen Prozess Stück für Stück zusammengesetzt und verklebt. Das Fachwerk des Landemoduls wiegt gerade einmal 500 Gramm und ist dabei in einer Kraftrichtung doch so steif, dass es den gewaltigen Belastungen beim späteren Raketenstart standhält. An anderen Stellen ist sie allerdings sehr verwundbar und kann durch unkontrolliertes Handhaben sehr leicht zerstört werden. Eine echte Herausforderung für das Integrationsteam und keine Aufgabe für Grobmotoriker. Und auch trotz der schuhkartonähnlichen Ausmaße von gerade einmal 30 x 30 x 20 cm sieht sie recht geräumig aus. Dieses wird sich allerdings schon bald ändern.

Das Herzstück des Landers ist seine hochleistungsfähige Rechen- und Steuereinheit, welche neben den Steckkarten für die Stromverteilung und der Nutzlasten in das elektronische Gehäuse (Ebox) millimetergenau eingepasst wird. Die Ebox ist ein integraler Bestandteil der Struktur und bietet neben den nötigen Befestigungsmöglichkeiten für den Schwungarm des Mobilitätsmechanismus, der Kommunikationsmodule und der Primärbatterie auch ein ausgeklügeltes Thermalsystem. Dieses leitet später die entstehende Energie effektiv von den inneren Wärmequellen weg und gibt sie nach außen ab, damit Mascot im Vakuum des Weltalls zu keiner Phase seiner Mission den eigenen Hitze-Tod erleidet.
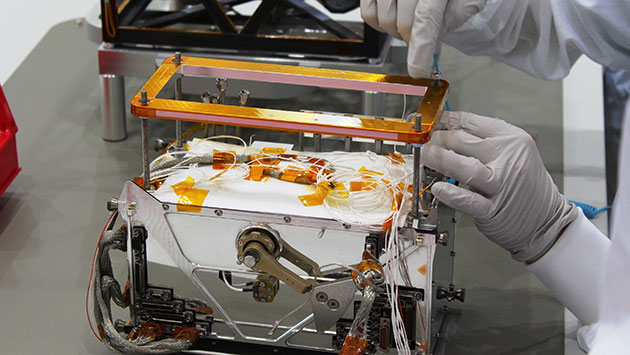

Nachdem die Ebox im Landemodul platzgefunden hat, sind bereits 50% des Gesamtvolumens verbraucht. Damit die Nutzlasten sowie die Sensoren später vom Onboard-Computer angesprochen werden können, muss nun die elektrische Verkabelung verlegt werden.
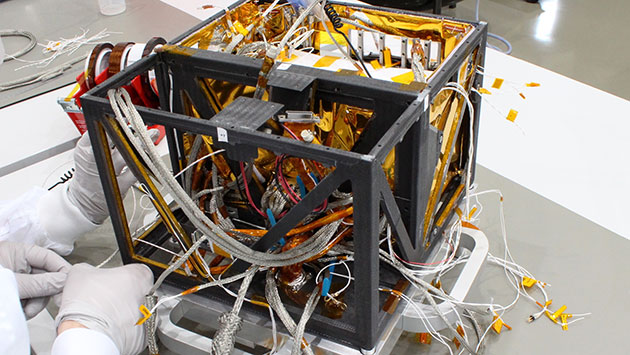
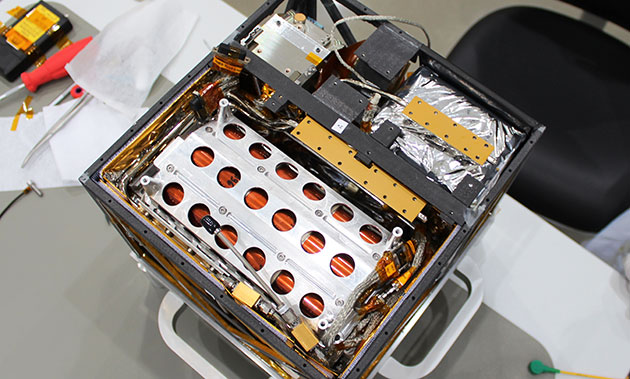
Mascot bringt die bewährte Technik eines konventionellen Stecker-Rundkabel-Konzepts an seine Grenzen. Das einfache Design ermöglichte dem Team die Leitungslängen und Führungen zeitsparend direkt am Modul selbst anzupassen. Jedoch mussten wir uns neue Methoden zur Bündelung, Leitungsführung und zur Abschirmung überlegen, um die hohe Anzahl von Strom- und Datenverbindungen auf so engem Raum unterbringen zu können. 549 Einzeladern wurden zu 44 nach Signalklassen vollgeschirmt und getrennten Leichtgewichts-Verkabelung zusammengefasst. Diese Leitungsbündel sowie die insgesamt 33 Steckverbindungen mussten so verlegt werden, dass beispielsweise der Schwungarm ungestört rotieren kann. Am Anfang wurde man von der schieren Anzahl an Kabelstränge nahezu erschlagen, doch nach einiger Zeit klarte das Bild im Inneren wieder auf und schuf Platz für das Hauptaugenmerk eines jeden Forschungssatelliten - die wissenschaftlichen Instrumente (Nutzlasten).
Eines der bemerkenswertesten Grundeigenschaften von Mascot ist sein äußerst hohes Verhältnis von Nutzlastmasse zur gesamten Systemmasse. Bei gerade einmal 9,6 kg zu landender Systemmasse finden Instrumente mit zusammen 3,1 kg Nutzmasse Platz. Das ist ein Verhältnis von 32%. Zum Vergleich: der Rosetta-Lander Philae schafft es beispielsweise auf ebenfalls sehr gute 27% (26 kg Instrumente bei 96 kg Landermasse) und der MARS Curiosity Rover der NASA bringt es lediglich auf 8,3% (75 Kg Instrumente bei 900 kg Rovermasse). Damit zählt Mascot zu den effizientesten Systementwicklungen in der Weltraumwissenschaft und Explorationstechnologie.
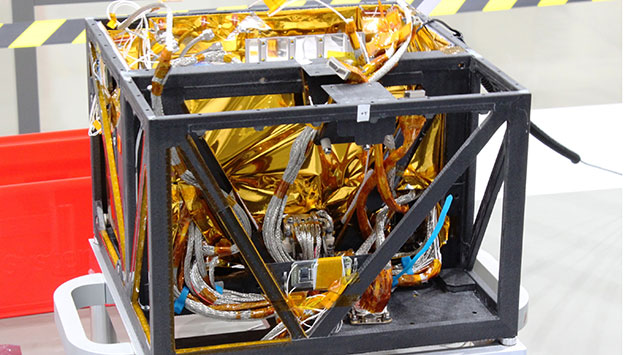
Um dieses Verhältnis zu erreichen, hat es in der Entwicklungsphase viele Konfigurationsversuche gefordert, und beim Einbau der insgesamt vier Instrumente in das reale Modul zeigten sich erneut die geringen Einbaumaße. Während das französische Infrarot-Mikroskop (IAS, Orsay/Paris) noch relativ einfach zu integrieren war, und lediglich mit Gleithilfsmitteln in Position rutschte, konnten die anderen drei Instrumente - die Kamera (DLR-PF, Berlin) das Radiometer (DLR-PF, Berlin) und das Magnetometer (TU Braunschweig) - nur in einem einzigen kombinierten und verwobenen Integrationsschritt eingepasst werden. Hierzu bekam das Integrationsteam auch tatkräftige Unterstützung durch die Nutzlastspezialisten um sicherzustellen, dass sich am Ende die einzelnen Sensorköpfe nicht gegenseitig im Weg stehen.

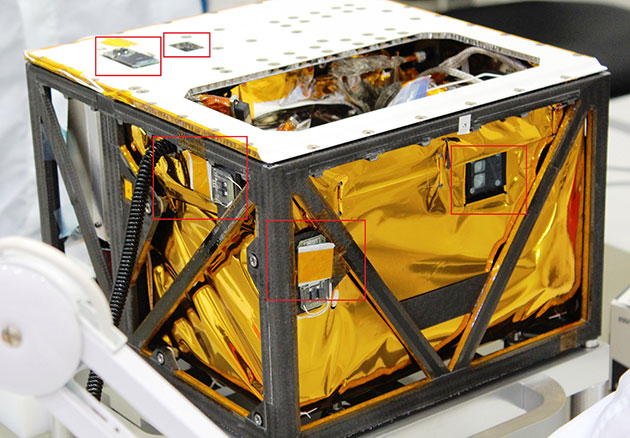
Im Anschluss wurden dann noch die restlichen Systemkomponenten des Energie- und Thermalsystems eingesetzte sowie weitere kleinere Sensoren für das Navigationssystem verklebt und verdrahtet. Diese "sehenden" und "fühlenden" Sensoren geben Mascot auf seiner Oberflächenmission die Möglichkeit, sich zu jedem Zeitpunkt über seine Orientierung und Lage bewusst zu sein. Diese Informationen sind extrem wichtig, damit auf dessen Entscheidungsbasis Mascot sein Vorhaben völlig autonom und selbstbestimmend erfüllen kann - ein weiteres Novum auf dieser Mission.
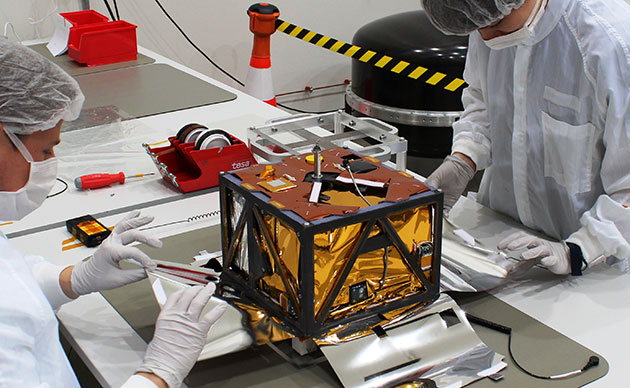
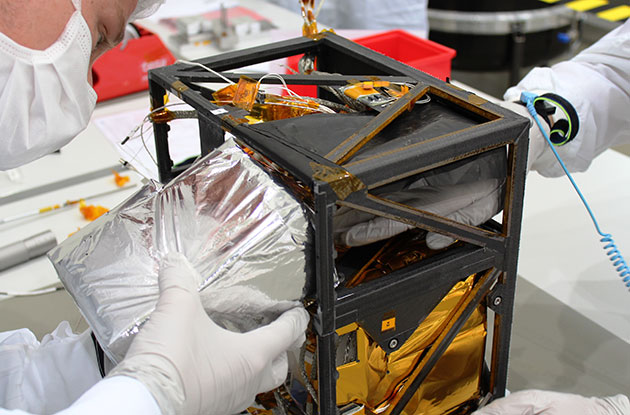
Nach der integrativen Fertigstellung der Landeeinheit und der Haltevorrichtung war es nun an der Zeit beide Module miteinander zu verbinden und zu schauen, ob das Team wirklich ein funktionstüchtiges kleines Raumfahrzeug erschaffen hat. Die Spannung war enorm: wird der Computer anspringen? Wird die Stromverteilungseinheit die richtigen Spannungen ausgeben? Werden die Sensoren nominale Werte anzeigen? Und vor allem, werden die Instrumente, gerade nach den Strapazen des Drückens, Biegens und Pressens in diese kleine Struktur, zum allersten Mal auch im Verbund miteinander funktionieren?
Die externe Spannungsversorgung wird eingeschaltet - alle Werte nominal. Dem Himmel sei Dank, kein Kurzschluss, keine kleinen Rauchwölkchen im Labor. Das hätte uns unsere Reinheitsexpertin auch niemals verziehen. Weitere Kommandos werden gesendet, das Radiometer nimmt Temperaturbereiche wahr, das Magnetometer zeichnet verschiedenste Störquellen auf, die Kamera macht Bilder und blinkt dabei mit seinem LED Array wie eine Discokugel, und bei dem Mikroskop hört man lautstark den Cryocooler rattern. Bis auf ein paar Sensorwerte, die wir uns noch nicht ganz erklären können sowie ein paar zusätzliche Ungereimtheiten bei den aufgenommen Daten war das erste Einschalten ein voller Erfolg - MASCOT lebt!
In den nächsten Tagen muss Mascot noch den Rütteltisch und ein paar Zyklen in der Thermal-Vakuumkammer überstehen bevor es dann auf direktem Weg nach Japan geht, um dort in seine Muttersonde Hayabusa-2 eingesetzt zu werden. Nach all den Strapazen in der hiesigen Integration auch nur noch eine Kleinigkeit!

Tags: