Das DLR hat als Beitrag für die japanische Hayabusa-2-Mission in Zusammenarbeit mit dem CNES und der TU Braunschweig eine Asteroiden-Landeeinheit MASCOT (mobile asteroid surface scout) entwickelt.
Laufzeit:
2011-01-01 bis 2018-12-31 Raketenstart: 3. Dezember 2014 Einsatz von MASCOT: 3. Oktober 2018
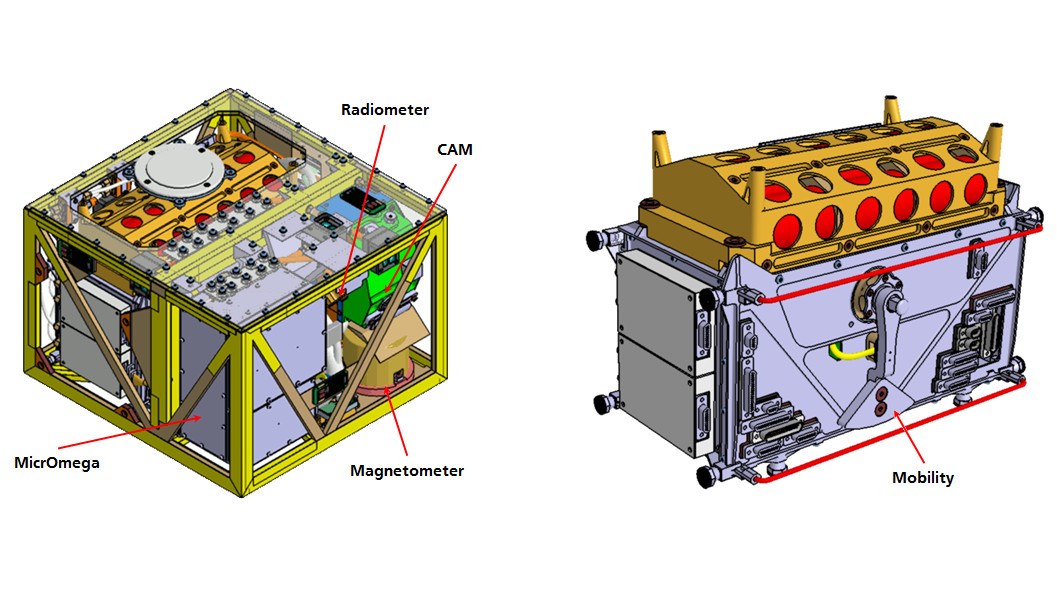
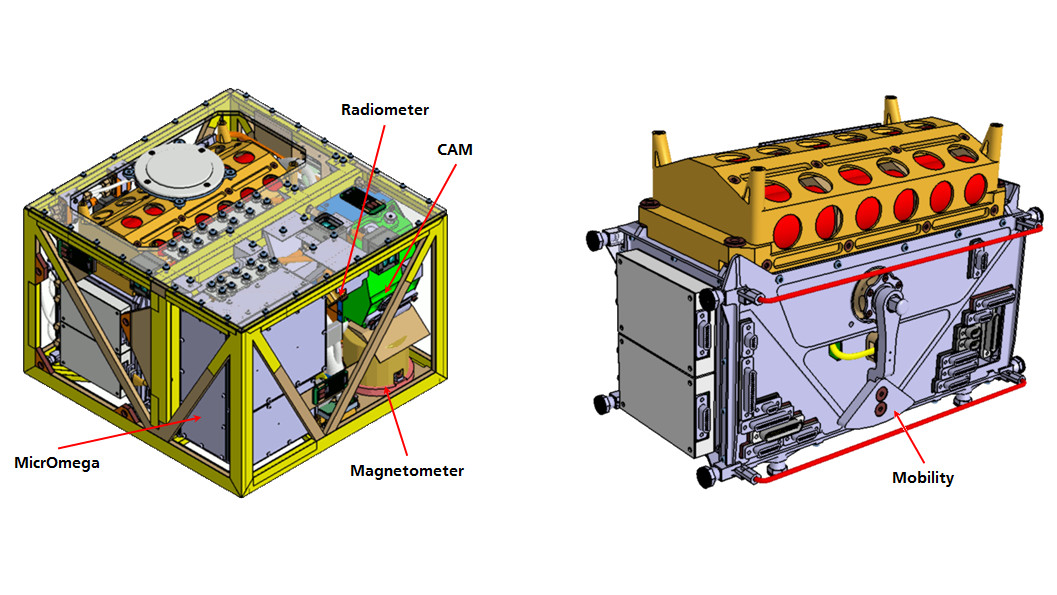
Die einzelnen Bestandteile von MASCOT sowie die Einordnung im Rahmen der Hayabusa-2-Mission werden vom Institut für Raumfahrtsysteme beschrieben.
Der Anteil des Instituts für Robotik und Mechatronik ist die Entwicklung des Schwungarms von MASCOT, der eine Fortbewegung auf einer Asteroidenoberfläche ermöglicht. Durch gezieltes rotatorisches Beschleunigen des Schwungarms kann MASCOT sich aufrichten oder hüpfend fortbewegen. Zu berücksichtigen ist dabei, dass der Zielasteroid 1999JU3 bzw. Ryugu nur eine sehr geringe Schwerkraft aufweist.
Der Start der Mission erfolgte am 3. Dezember 2014 um 13:22:04 (JST) von Tanegashima Space Center. Die Ankunft der Sonde Hayabusa2 am Asteroiden war im Sommer 2018. MASCOT wurde am 3. Oktober 2018 von der Sonde ausgeklinkt und fiel langsam auf die Asteroidenoberfläche, wo der Fortbewegungsmechnismus erfolgreich genutzt werden konnte, um eine geeignete Lage zu erreichen, von der aus weitere wissenschaftliche Messungen gestartet werden konnten.
Mehr technische Informationen über den Fortbewegungsmechanismus befinden sich auf der Seite über das MASCOT-System.
MASCOT-Szenario
Künstlerische Darstellung von Hayabusa2 und MASCOT bei der Missionsdurchführung auf dem Asteroiden.


{kind=link}
{kind=link}