
KI und Regelung
Der Entwurf von Steuerungsalgorithmen ist unser wichtigstes Mittel, um komplexen dynamischen Systemen wie Robotern, Flugzeugen, Autos, Trägerraketen usw. zu helfen, ihre beabsichtigten Funktionen zu erfüllen. Diese Funktionen können von der einfachen Stabilisierung oder Dämpfung oszillierender Dynamik über die Unterdrückung der Auswirkungen von Störungen und die genaue Verfolgung mehrerer Referenzen bis hin zu sehr komplexen Aufgaben oder Abfolgen von Aufgaben reichen, die mehr oder weniger autonom ausgeführt werden sollen. Bekannte Beispiele sind Autopiloten, die Funktionen enthalten, mit denen ein Flugzeug automatisch Geschwindigkeit, Kurs und Höhe verfolgen kann, oder Roboter, die in einer Fabrik Produkte zusammenbauen.

{kind=link}
Rückkopplungssteuerung
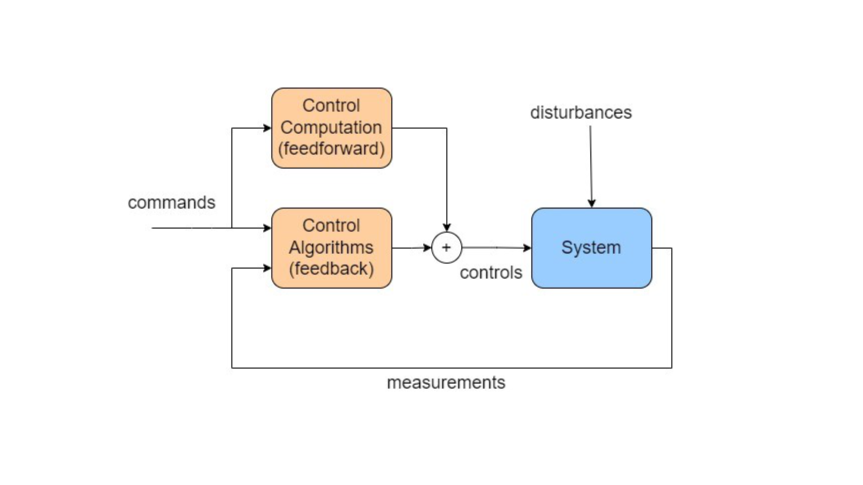
Der Kern solcher Funktionen basiert meist auf einer Rückkopplungssteuerung. Das bedeutet, dass auf der Grundlage des aktuellen Bewegungszustands des Systems, wie er von Sensoren registriert wird, kontinuierlich Steuerbefehle berechnet und auf das System angewendet werden (siehe Abbildung oben). Das Tolle an der Rückkopplungssteuerung ist, dass sie von sich aus Korrekturmaßnahmen vorsieht, wenn das dynamische System durch äußere Einflüsse gestört wird oder wenn das dynamische Verhalten des Systems im Voraus nicht genau bekannt ist (was natürlich meistens der Fall ist).
Das Interessanteste an der Rückkopplungssteuerung ist, dass es viele Möglichkeiten gibt, etwas falsch zu machen, was dazu führt, dass Leistungsziele verfehlt werden, bis hin zu instabilem Verhalten und dem daraus resultierenden Scheitern des Systems! Vor allem bei hochdynamischen Systemen wie Autos, Flugzeugen oder Raketen muss ein strukturierter und sorgfältiger Ansatz gewählt werden, um sicherzustellen, dass das System auf sichere Weise eine gute Funktionsleistung zeigt.
Dieser Ansatz basiert auf der Regelungstechnik, einer speziellen Disziplin, die über sehr nützliche Werkzeuge zur Analyse des dynamischen Systemverhaltens sowie über nützliche Metriken zur Entwicklung und Bewertung von Regelalgorithmen verfügt. Für den eigentlichen Entwurf dieser Algorithmen steht eine ständig wachsende Palette von Methoden zur Verfügung, die jeweils ihre spezifischen Stärken haben. Unser Institut widmet sich dem Gebiet der Steuerungstechnik und einer unserer Forschungsschwerpunkte ist die Entwicklung neuer Methoden bzw. die Weiterentwicklung dieser Methoden, um sie für den Entwurf immer komplexerer Systeme einsetzen zu können.
Der Entwurf von Steuerungsalgorithmen erfordert fast immer, dass das dynamische Verhalten in Form eines Simulationsmodells erfasst wird. Selbst wenn die Kontrollmethode dies nicht erfordert, ist die Verifizierung mittels Simulation oft viel billiger als ein Test (z.B. bei Flugzeugen). Die Steuerungsalgorithmen selbst werden in der Regel grafisch zusammengestellt, indem sogenannte Blockdiagramme in Tools wie Matlab/Simulink oder Modelica verwendet werden. Die Blöcke können aus einer mathematischen Synthesemethode für Kontrollgesetze stammen oder parametrisierte Filter, Verstärkungen und Zeitkonstanten sein, die mit Hilfe einer multikriteriellen Optimierung abgestimmt werden können, um die oben genannten Anforderungen zu erfüllen. Die Übersetzung eines Blockdiagramms in Software, die auf einem Computer innerhalb des eigentlichen Systems implementiert werden kann, wird häufig mit Hilfe von Tools zur Codegenerierung automatisiert.
Wie bereits erwähnt, widmen wir einen großen Teil unserer Forschung der Weiterentwicklung und Verbesserung von Kontrollmethoden. Hier sind einige, an denen wir in letzter Zeit gearbeitet haben:
Inversionsbasierte Steuerung
Ein Kontrollsystem muss fast immer auf eine bestimmte Art von System abgestimmt werden. Die inversionsbasierte Steuerung erfasst den größten Teil der Systemabhängigkeit mit Hilfe von inversen Modellgleichungen. Die Anpassung von Steuerungen von einem System auf das andere beschränkt sich weitgehend auf das Einfügen von Modellgleichungen des neuen Systems. Wir können dies automatisch anhand von Modellen tun, die in der Modelica-Sprache definiert sind, was uns eine Menge Arbeit erspart. Weitere Vorteile sind die automatische Anpassung an nichtlineare oder variierende Dynamiken und die Entkopplung, wenn verschiedene Befehle gleichzeitig verfolgt werden müssen. Wir haben auch Möglichkeiten entwickelt, Modellberechnungen durch Messungen der Beschleunigung und der Steuerausschläge zu ersetzen und waren die ersten, die solche so genannten "inkrementellen Methoden" im Flug zur Anwendung brachten.
Robuste Steuerung
Dieser Bereich ist die umfassendste Erweiterung der klassischen Kontrolltheorie (deren Entwicklung zu Beginn des 20. Jahrhunderts begann) auf Systeme mit mehreren Steuerungen und mehreren Sensoren, die darauf abzielen, mehrere Variablen gleichzeitig zu verfolgen. Sie ermöglicht es, Unsicherheiten im System explizit zu berücksichtigen. Das ist großartig, da man die Leistung (Genauigkeit, Beweglichkeit usw.) gegen den Grad der Unsicherheit abwägen kann.
Intelligente Steuerung
Dies ist ein schnell wachsender Bereich, der Methoden der künstlichen Intelligenz nutzt. Es ermöglicht Kontrollfunktionen oder Unterfunktionen, online zu lernen und dabei das dynamische Verhalten des Systems zu verbessern. Dies ist eine längerfristige Forschung, aber die Möglichkeiten scheinen endlos zu sein. Wir haben bereits Methoden bei Autos und sogar Flugzeugen in Flugtests eingesetzt, mit vielversprechenden Ergebnissen!
Optimierung
Wir setzen in unseren Designprozessen viel Optimierung ein, vor allem als großartiges Hilfsmittel, um manuelles Ausprobieren zu vermeiden, wenn wir versuchen, viele Anforderungen gleichzeitig zu erfüllen. Wir setzen sogar Online-Optimierung in Systemen (Autos) ein, um die Leistung von Controllern zu verbessern oder die besten Flugbahnen für Roboter während ihres Einsatzes oder für treibstoffsparende Routen für Flugzeuge zu finden.
Algorithmen für Beobachter
Sensoren sagen nicht immer direkt, was wir überwachen oder messen wollen. Aus diesem Grund entwickeln wir Beobachter, die die gewünschten Variablen aus den verfügbaren Sensormessungen und dem Wissen über das System schätzen. Wir entwickeln sehr intelligente Algorithmen, um Bewegungszustände von Autos oder sogar Belastungen von Flugzeugen während des Flugs zu schätzen.
Wenn wir neue Methoden implementieren und testen, stoßen wir auf alle Zwänge, die mit der Umsetzung neuer Ideen verbunden sind, und können sogar den Aufwand abschätzen, der erforderlich ist, um die Software für ein Zielsystem zertifizierbar zu machen (was beim Einsatz in Flugzeugen oder Autos unerlässlich ist). Deshalb führen wir Flugtests mit Flugzeugen durch, machen Fahrversuche mit Autos usw.
Die Kombination aus exzellenter Systemkenntnis, tiefem Verständnis von Kontrollsystemen und der Erfahrung, Kontrollalgorithmen auf allen Arten von Systemen zum Laufen zu bringen, sind einzigartige Stärken unseres Instituts!