
Robotic exploration

Rover Simulation Toolkit: A Library with Base Elements to Simulate Planetary Exploration Rovers
With the exception of the Moon, it is currently impossible for people to step on the surfaces of celestial bodies. And mobile robots, so-called rovers, are very important and helpful in preparing crewed missions.
But the environment e.g. on Mars is very different than on Earth. Gravity, atmosphere, day-night-rhythm and temperatures differ much from the conditions on Earth. It is however very important to test robots prior launch because it is impossible to grip in afterwards. Simulations help to test rovers because the environment can’t be recreated well enough in the labs. In addition, simulations save time and money in the development phase.
The „planetary exploration“ group at the institute SR has therefore developed a library: the Rover Simulation Toolkit, short RST. It contains a large number of different base elements with which one can quickly and easily assemble rover simulation models. It is built upon the modeling language Modelica[1] and extends its Standard Library for rover simulations. Further, Modelica has a simple interface to access external software. Finally, models can be exported as well such that they can be loaded and executed in other software, e.g. Matlab.
Domains
The Rover Simulation Toolkit from Institute SR covers many aspects of robots. Focus is on the locomotion subsystem of rovers but the whole rover is always considered. Domains such as communication, materials and payload are not part of RST. Those are usually simulated and tested separately. But RST is relatively easy to extend.
Validation of models
The simulation models of planetary rovers are validated in the laboratory on test benches such as the TROLL (LINK) and the PEL. On the other hand, models of complete systems such as the SCOUT are also evaluated as part of test campaigns in analogue environments (e.g. on the ETNA volcano or in DLR's own open-air test field).
Mechanics
All parts of RST that have mass and inertia belong to the mechanical building blocks. The rigid body dynamics from the Modelica Standard Library is used, there is however also the possibility to include flexible bodies or to connect rigid bodies together with springs and dampers.
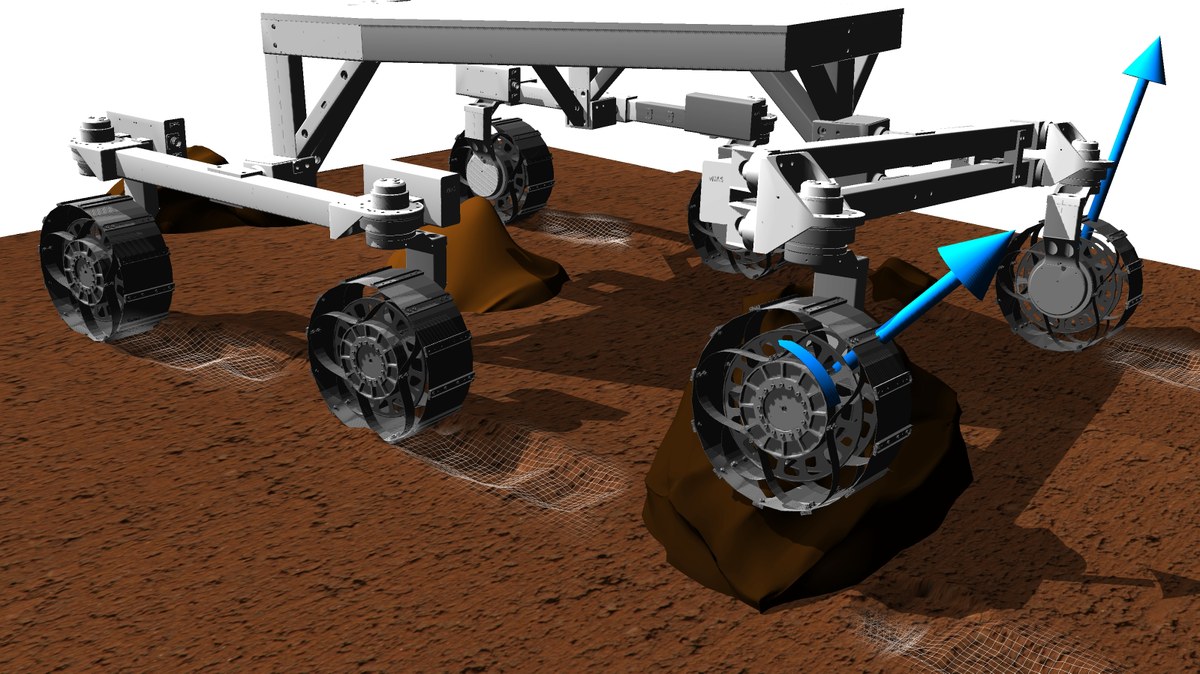
The wheels are modeled with particular detail, these are important parts of rovers. They consist of a cylinder or ring with so-called grousers, small rungs or larger shovels along the rim, that can be assembled variously through a set of parameters. The simulation of wheels that drive in sand and encounter small and larger rocks, is one unique selling point of RST compared to other libraries in that it contains a large choice of models for contact dynamics and terramechanics. The models reach from simple approximations after M. G. Bekker through machine learning models and general contact models after H. Hertz to the very detailed Soil Contact Model SCM that also considers the deformation of the surface. Even more precise contact dynamics models based on particle simulations are not part of RST because they only are meaningful for simulating single wheels.
Actuators and Sensors
The rover wheels and other active elements need to be driven also in the simulation model. For this purpose, there exists an RST sub-library for servo drives at various levels of detail. In the simplest (ideal) case the desired position or velocity is applied one to one, in the most complex (realistic) case an electric motor is simulated. There are other actuator models in between, for example having an efficiency lower than 1. Spring mechanisms for single use, e.g. to open flaps or solar panels, are as well part of the sub-library.
There are also ideal and non-ideal sensor models in RST. Non-ideal sensors have for example an upper and lower measurement limit, a finite precision (e.g. only two digits after the decimal point) or a subject to noise.
RST’s structure always ensures that swapping between versions of actuators and sensors is easy because the interface to the mechanical elements is consistent.
Thermal
Temperatures on planets and moons are very different from temperatures on Earth. Heat flux through convection only exists with an atmosphere. Temperatures and heat flux also have an influence on the efficiency of motors or the accuracy of sensors. These thermal aspects are implemented in RST at a small scale. Most of the simulation scenarios are so short that the temperature can be assumed to be constant, thus also the efficiency of actuators is constant.
There is a simple thermal model for long scenarios as well. This can easily be extended if needed. Here again the Modelica base is advantageous.
Internal Communication and Control
All values and signals are always known in a simulation. This is not the case on hardware. Thus, rovers in RST always have a bus system that assures data exchange between subsystems and that only contains values measurable in reality. The complete data is saved only for post processing.
Using the bus information, controller for mechanisms, chassis or navigation can be implemented. This makes RST a very good tool to test controller. Design and software in the loop tests are possible at large scale. On the one hand controllers can be implemented in Modelica directly in RST or on the other hand loaded from external code. Alternatively, the whole rover model can be exported and used in another simulation software.
Control
Typically, rovers are over-actuated, meaning they have more degrees of freedom - i.e. motors - than they need to execute a motion request. This allows other criteria such as wheel slip or energy consumption to be optimised. The extensive model library with sub-models of varying levels of detail enables the development of such chassis controllers. While simple models are used for controller synthesis, the development can then be verified with more complex and accurate models.
Utilities
The Modelica Visualization Library is also developed at the institute SR. This library is fully integrated into RST such that simulations not only gives data but 3D animations.
It is also possible to replace the simulation of mechanics, actuators and sensors in RST with interfaces to the hardware. The Modelica libraries for drivers and hardware level communication are used for this. Thus, one can use a rover simulation model also as software to control the hardware, as done for the Scout rover (see further down). That also means that simulation and hardware are driven by the same control software.
Validation of Models
A simulation is only good and useful if one can trust its results. This validation of models mainly means validation of terramechanics in the context of RST. The so-called SR TROLL facility serves this purpose. A robot manipulator follows a given trajectory above a sand box while a wheel turns with given speed at the end effector. Forces and torques at the mounting point are measured and compared with the same test in simulation. The Soil Contact Model SCM compares well to the measurements while the easy terramechanics models in general only give correct orders of magnitude and trends.
Missions
RST is among others used in the following two projects.
Martian Moons Exploration MMX Rover IDEFIX
DLR together with CNES is providing a small (25 kg) rover tot he JAXA (Japan) Mission MMX. The rover is going to drive on the Mars moon Phobos in 2028. Gravity there is 2000 times weaker than on Earth. This has consequences on the sand surface and makes representative tests on Earth difficult if not impossible.
Simulating the RST rover model has been key in the development of IDEFIX. Especially the RST contact dynamics have been important. The models are validated with TROLL measurements only for Earth gravity. It is known from the rovers on Mars that some parameters scale with gravity, but if this scaling also is valid for Phobos gravity, is not known. This question will only be answered once IDEFIX drives on Phobos in 2028. The simulation will also be helpful for operating the rover.
More information in the dedicated article https://www.dlr.de/de/forschung-und-transfer/projekte-und-missionen/mmx/simulation-die-bedingungen-auf-phobos-realitaetsnah-nachbilden
Space Cave Exploration Unit SCOUT
The DLR Institute SR drives the development of an innovative rover whose goal is to explore the caves of Mars. Simulation of the rover as played an important role from the beginning, e.g. to design the wheels, the connectors between modules and to test software. This simulation driven development saves time and money and also opens the perspective of cooperation agreements. Partners can test the systems, payloads and software on the simulation prior access on the hardware.
More information in the dedicated article https://www.dlr.de/sr/desktopdefault.aspx/tabid-11613/20314_read-53800/
[1] https://modelica.org/, 13.03.2024