Wie Schlupp auf dem blauen Planeten – Roboter auf „irdischem Mars“ von der ISS aus bedienen
| Raumfahrt
Wie Schlupp auf dem blauen Planeten – Roboter auf „irdischem Mars“ von der ISS aus bedienen
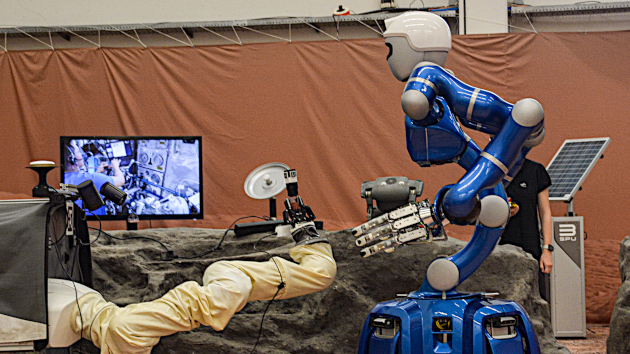
Die Surface-Avatar-Experimente sollen zeigen, wie ein Team von Robotern teil- bis vollautonom zusammenarbeiten. Hier geht der humanoide DLR-Roboter Rollin‘ Justin auf den ESA-Rover Interact zu. Justin soll von diesem eine Gesteinsprobe übernehmen und zum Lander bringen.
Credit:
DLR (CC BY-NC-ND 3.0)
Beim Nachdenken über einen netten Aufhänger für diesen Beitrag bin ich schließlich bei Schlupp vom grünen Stern hängengeblieben. Kennen Sie den? Er ist Bewohner des Planeten Balda 7-3, erschaffen von Ellis Kaut, der Mutter des Pumuckls, und berühmt geworden durch die Marionettenversion der Augsburger Puppenkiste, die einige Dutzend Kilometer nordwestlich unseres Kontrollzentrums gelegen ist. Wie komme ich ausgerechnet auf Schlupp, wenn ich hier über Experimente aus dem Forschungsfeld der Telepräsenz-Robotik von DLR und ESA berichten möchte, die diese Woche bei uns in Oberpfaffenhofen gelaufen sind?
Unsere Halle ist derzeit der Marsumgebung nachempfunden: Der Boden ist mit einer „Marsbodentapete“ beklebt, ein künstlicher Horizont weist hinaus in die „Weite des Mars“ – und ein paar Styroporfelsen geben dem Ganzen noch einen etwas „unwirtlichen Touch“. Aber auch die Menschheit ist bereits auf der „Oberfläche“ angekommen: Ein Lander mit einem Roboterarm steht in der einen Ecke, ein Rover mit einem weiteren Arm in der anderen, mittig unser DLR-Roboter Rollin' Justin.
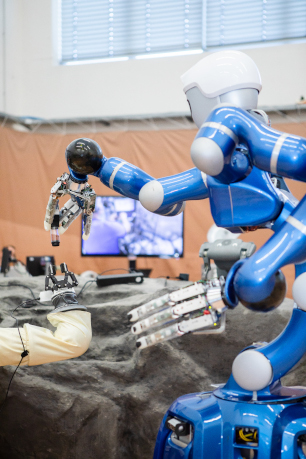
Der Interact Rover hat laut „Drehbuch“ eine Gesteinsprobe eingesammelt und übergibt sie Justin. Auf dem Bildschirm im Hintergrund ist unscharf Astronaut Frank zu erkennen, der die Zusammenarbeit der Roboter von der ISS steuert.
Credit:
DLR (CC BY-NC-ND 3.0)
Ach ja, wenn man genau hinsieht, bemerkt man auch die vielen Computer, Serverschränke und Kommunikationsstationen, die eigentlich nichts auf dem „Mars“ verloren haben, die Robotikexperte Neal Lii und sein Team aber brauchen, um das gesamte Szenario zu überwachen und zu konfigurieren.
Die Steuerung der Roboter jedoch – und hier kommen die Schnüre der Marionetten aus der Analogie zum fiktionalen Schlupp ins Spiel – erfolgt heute „von oben“, aus der Internationalen Raumstation ISS. NASA-Astronaut Frank Rubio hat dort ebenfalls einige Monitore und einen sehr komplexen Steuerungsmechanismus vor sich. Er sieht „mit den Augen der Roboter“ bei uns unten, er „fühlt“ den Widerstand, wenn der Roboter bei seinen Bewegungen auf ein Hindernis stößt – und er kann die Roboterhand gleich seiner eigenen Hand bewegen und damit greifen.
Neal hat ein komplexes Szenario ersonnen: Das „Drehbuch“ sieht vor, dass der Lander – ferngesteuert durch einen Astronauten in der Marsumlaufbahn – auf der Planetenoberfläche entladen werden muss, ein seismischer Sensor soll punktgenau ausgebracht, Gesteinsproben gesammelt und für den Rücktransport eingeladen werden.
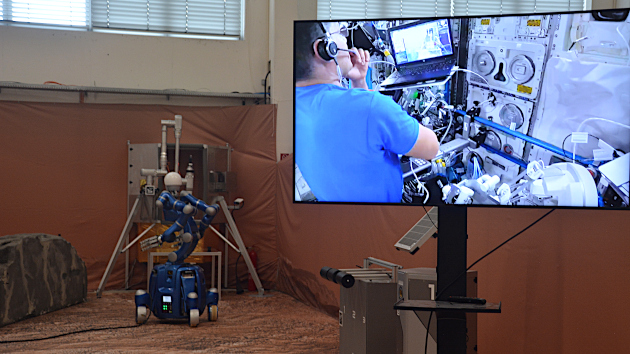
Manche Manöver führt der Roboter auch selbständig durch – Frank Rubio muss hier auch nur zuschauen…
Credit:
DLR (CC BY-NC-ND 3.0)
Die meisten Aufgaben kann Frank, der sich „nur“ auf der ISS befindet, selbstständig lösen – nur wenige Male muss Neal über den „Space-to-Ground“-Sprechfunkkanal eingreifen und dem Astronauten ein paar Tipps geben.
Und zwischendurch reichen sich der Astronaut und Samuel Bustamante, ein Mitglied des Robotik-Teams, sogar „via Justin“ die Hand – einen solchen „intergalaktischen“ Handschlag gab es noch nicht oft in der jungen Geschichte der Telerobotik.
Handshake zwischen Raumstation und Kontrollzentrum
Alle „Fäden“ laufen dann bei uns im Kontrollraum ein paar Meter weiter zusammen: Hier ist Lucia Brunetti heute die verantwortliche Flight Controllerin an der EPIC-Konsole: Das EPIC-Team war für das Robotik-Team der Kontakt für die operationelle Integration des Experiments in den „ISS-Alltag“. Und heute hält Lucia ihrem Kollegen Neal den Rücken frei, damit er sich auf den Astronauten im All und Roboter auf dem „irdischen Mars“ konzentrieren kann. Sie steht in Kontakt mit dem Columbus-Flugdirektor, hat Zeit und Timeline im Blick, kündigt jede geplante Unterbrechung des Funkkontakts mit der ISS an und stellt mit den Kollegen im Kontrollraum sicher, dass die Datenverbindungen richtig konfiguriert sind.
NASA-Astronaut und Justins „Marionettenspieler“ auf der ISS
Credit:
NASA (CC BY-NC-ND 2.0)
Für die DLR-Robotikforschung liefert das Experiment wichtige Erkenntnisse der verschiedensten Art, zum Beispiel über Latenzzeiten, Veränderungen der Wahrnehmung in der Schwerelosigkeit oder operationelle Hürden – alles wertvolles Wissen, denn Interaktionen zwischen Robotern und Menschen werden in Kürze Hochkonjunktur haben, wenn wir uns jetzt (wieder) Mond oder Mars zuwenden.
Für uns am Columbus Control Center, dem Col-CC, ist es unheimlich cool und einmalig, ein Experiment so unmittelbar „nebenan“ mitzuerleben! Und Schlupp, er lebe hoch!