Das EOC hat eine großangelegte Messkampagne in Braunschweig koordiniert. Dabei wurden verschiedene Verkehrsszenarien durch eine Vielzahl von Sensoren am Boden und aus der Luft erfasst. Der so gewonnene Datensatz dient zur Entwicklung von Verfahren, mit denen automatisierte Fahrzeuge künftig ihre Position selbst bestimmen können sollen.
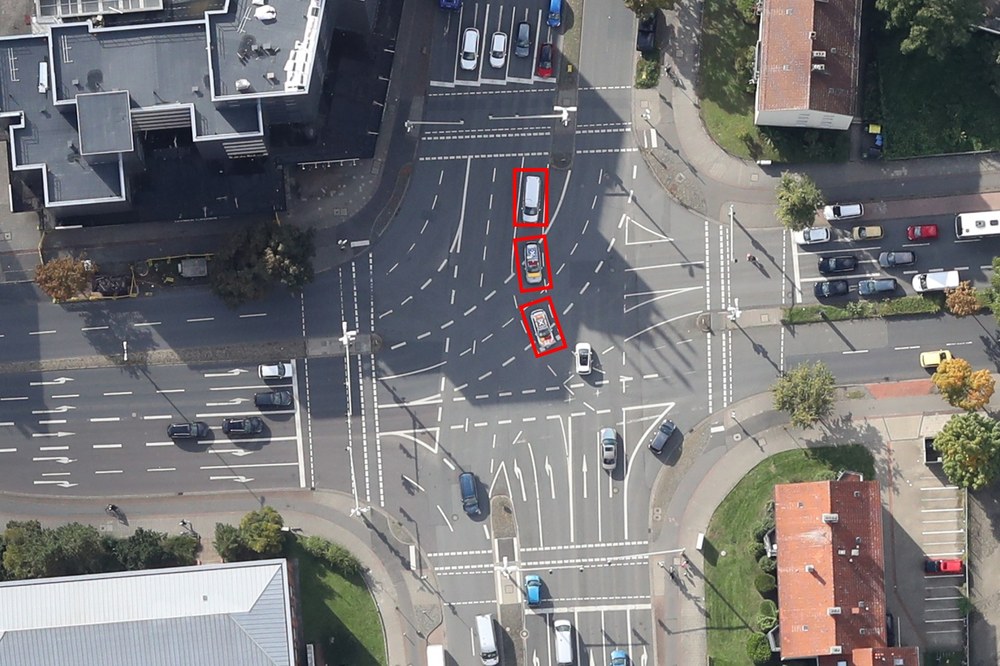
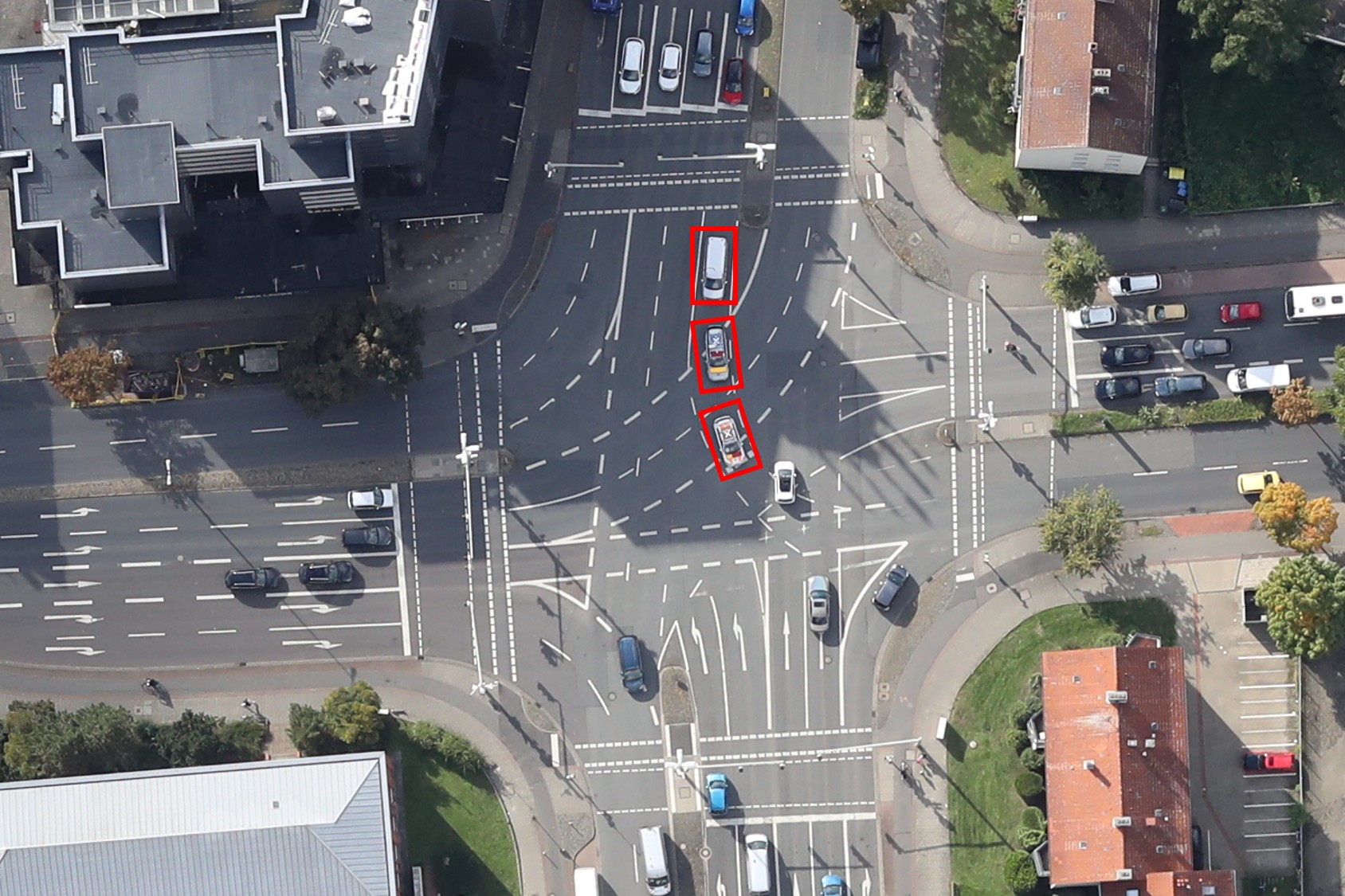
Im Rahmen des Verkehrsprojekts „KoKoVI“ (Koordinierter kooperativer Verkehr mit verteilter, lernender Intelligenz) war das EOC an einer großangelegten Messkampagne mit mehreren DLR-Instituten in Braunschweig beteiligt. Zwei Messfahrzeuge fuhren hierfür festgelegte Teststrecken ab. Die an den Fahrzeugen angebrachten Sensoren zeichneten auf ihrer Fahrt das Fahrzeugumfeld mit zahlreichen Sensoren aus der Bodenperspektive auf. Zeitgleich wurden sie und ihre Umgebung mit dem hochauflösenden 4k-Kamerasystem des EOC an Bord eines Hubschraubers aus der Vogelperspektive erfasst. Durch die Messkampagne konnte ein Datensatz generiert werden, der unterschiedliche Situationen im Straßenverkehr aus möglichst vielen Perspektiven und mit Hilfe verschiedener Sensoren beleuchtet. Die Kombination dieser Daten soll es automatisierten Fahrzeugen künftig ermöglichen, die eigene Position, sowie das Umfeld genauer zu bestimmen.
Nach intensiver Vorbereitungszeit und diversen Tests der Fahrzeug- und Hubschrauberkomponenten in Oberpfaffenhofen und Braunschweig startete am 26.09.2022 die einwöchige Messkampagne des Projektes KoKoVI in Braunschweig. Unter Beteiligung des EOC, des Instituts für Verkehrssystemtechnik (TS), des Instituts für Optische Sensorsysteme (OS), des Instituts für Kommunikation und Navigation (KN) und der Einrichtung Flugexperimente wurde eine Vielzahl verkehrsrelevanter Daten in Braunschweig sowie entlang der umliegenden Landstraßen und Autobahnen erhoben. Den Blick von oben auf das gesamte Verkehrsgeschehen lieferte dabei das 4k-Kamerasystem an Bord eines Hubschraubers. Die hochaufgelösten Luftbilder zeigen die Kampagnenteilnehmenden in vielfältigen Verkehrssituationen: Fahrzeuge bei hohen Geschwindigkeiten auf Autobahnen und Landstraßen, im dichten innerstädtischen Verkehr und deren Interaktion mit Radfahrenden und Fußgängern an komplexen urbanen Knotenpunkten. Zeitgleich wurden durch zahlreiche Lidar- und Kamerasysteme Daten aus Perspektive der Beteiligten am Boden aufgenommen, sodass sich daraus zusammen mit den Daten stationärer Messanlagen entlang der Teststrecken ein konsistenter und reichhaltiger Datensatz ergibt. Ein Schwerpunkt der folgenden Arbeiten des EOC liegt in der Erkennung und Verfolgung von bewegten Verkehrsteilnehmenden in Luftbildsequenzen und der Ego-Lokalisierung von Fahrzeugen mit KI-Algorithmen.
Innerhalb des Projekts KoKoVI arbeiten acht DLR-Institute und -Einrichtungen gemeinsam an Technologien zur Vernetzung von Verkehrsteilnehmenden, um die zukünftigen Mobilitätsbedürfnisse der Gesellschaft zu erfüllen und gleichzeitig den Straßenverkehr sicherer, effizienter und umweltfreundlicher zu gestalten. Der Verkehr wird als vernetztes System betrachtet, in welchem Fahrzeuge, Radfahrende, Fußgänger und die Verkehrsinfrastruktur selbst Daten austauschen und miteinander kooperieren. Der daraus entstehende Mehrwert für Menschen und deren Mobilität wird während des Projekts anhand von Anwendungsfällen demonstriert.




{kind=link}
{kind=link}
{kind=link}