„Es regnet seit Tagen, die üblichen Routen im Südsudan sind nicht mehr befahrbar. Für die Lebensmittellieferung des World Food Programme (WFP) muss eine neue Route gewählt werden, die für menschliche Fahrer gefährlich sein kann. Das AHEAD-Team wird daher vom WFP beauftragt, um mit einem ferngesteuerten SHERP ohne Fahrer Lebensmittel in ein abgelegenes Dorf im Südsudan zu liefern.“
Das Szenario der Abschlussdemonstration am 09.11.2022 auf dem DLR-Gelände in Oberpfaffenhofen orientierte sich an diesem zukünftigen, möglichen Anwendungsfall. Der SHERP wurde zunächst am Startpunkt beladen. Im GMOC (Global Mission Operation Center) wurde die Gesamtmission geplant und wichtige Informationen dem LMOC (Local Mission Operation Center) zur Verfügung gestellt, um von dort aus den SHERP zu steuern. Nach zweijähriger Laufzeit des AHEAD-Projekts (Autonomous Humanitarian Emergency Aid Devices) konnten erstmals alle technischen Komponenten der Mission erfolgreich getestet werden.
Das GMOC kann weltweit operieren und an einem zentralen Ort stationiert sein, weit weg von den einzelnen Missionsorten. Langfristig könnte es sich sogar in der WFP-Zentrale befinden. Während der Entwicklungs- und Demonstrationsphase von AHEAD wurde im ZKI ein prototypisches Betriebszentrum eingerichtet, um erste Konzepte zu entwickeln und Elemente des GMOC zu testen. Die Hauptaufgaben sind dabei sowohl die Vorplanung der Mission, das Gesamtmanagement des Einsatzbetriebs sowie die Evaluierung der Einsätze durchzuführen und mittels aktueller Lagekarten und -bewertung (basierend auf Erdbeobachtung und weiteren Geodaten) zu begleiten. Das Lagebild des GMOC soll dabei alle relevanten Geoinformationen der Missionsregion bereitstellen, angefangen vom Überblick über die Topographie der Region, Eigenschaften potentieller Routen bis hin zu semantischen Datenebenen, z.B. Kriseninformation (Hochwasser) oder relevante Objekte im Verlauf der Truck-Route (Hindernisse, Häuser oder Brücken). Zudem soll das Lagebild zukünftig auch für die Planung der Kommunikation, z.B. Abdeckung der Funkverbindung, zwischen LMOC und Truck dienen.
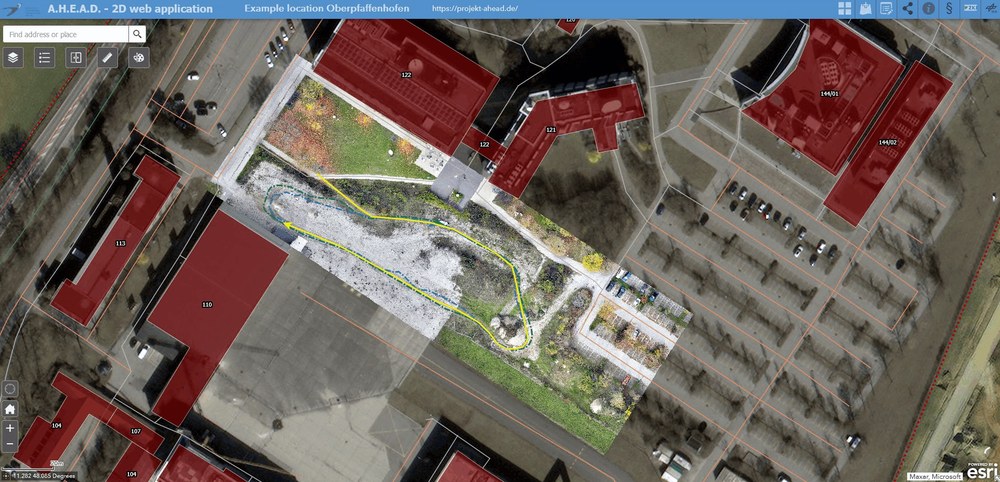
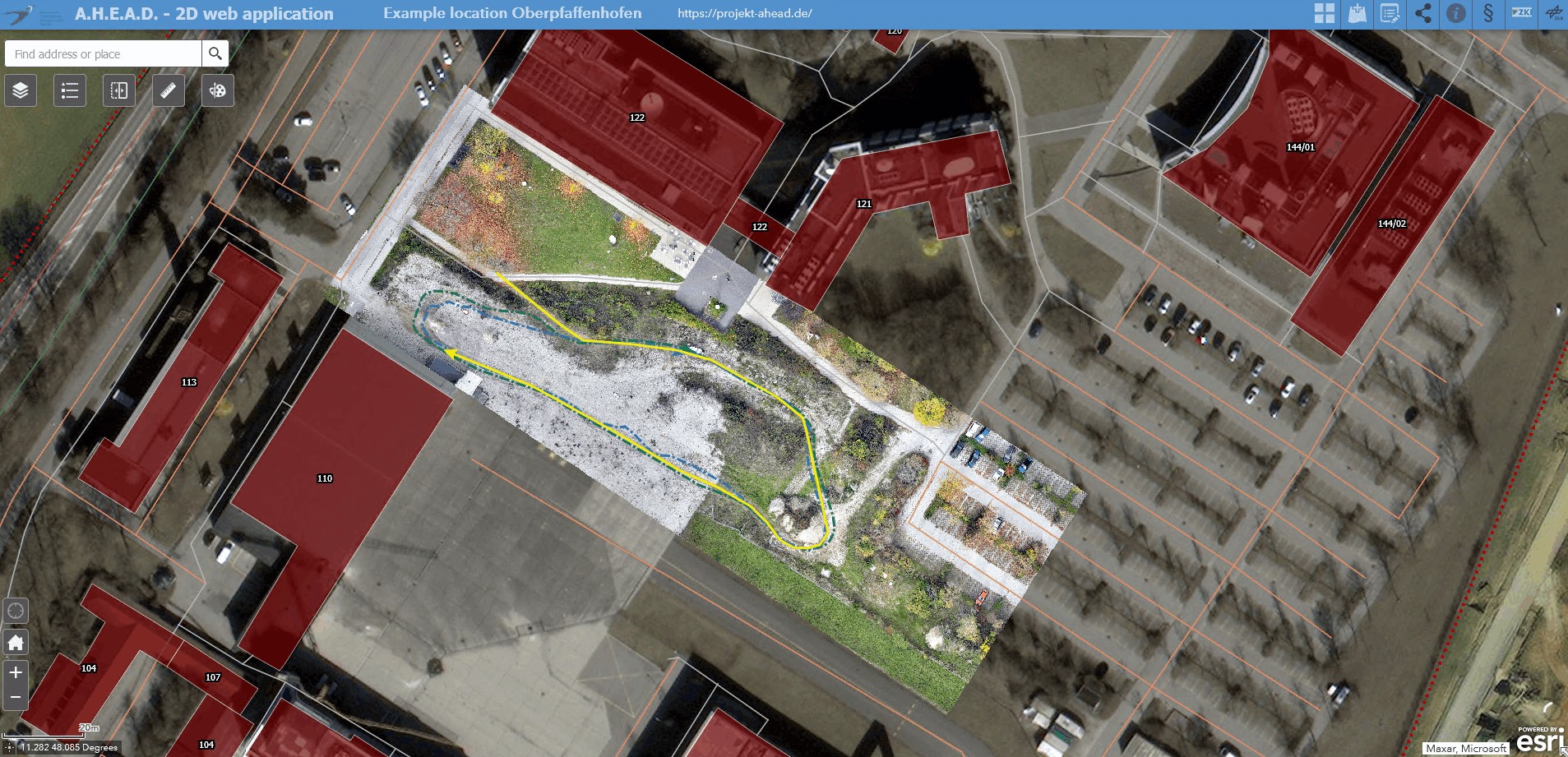
Zur Unterstützung dieser Aufgaben wurde entsprechend ein interaktives 2D Lagebild entwickelt. Im webbasierten Viewer wurden Geobasisdaten, Satellitendaten, hochaktuelle Drohnendaten und digitale Geländemodelle des Testgeländes in Oberpfaffenhofen kombiniert. Diese Darstellung ermöglichte zum einen eine interaktive Erkundung des zu befahrenden Gebiets. Zum anderen wurde darauf basierend eine mögliche Route für den Truck geplant und diese Navigationsroute automatisiert an das LMOC übermittelt. Umgekehrt konnte vom LMOC aus die Live-Position des Trucks direkt in das 2D Lagebild des GMOC übertragen, integriert und Nahe-Echtzeit angezeigt werden. GMOC und LMOC stehen somit im permanenten Austausch miteinander.
Neben den beteiligten Projektpartnern, allen voran dem World Food Programme (WFP) und den DLR-Instituten RM (Institut für Robotik und Mechatronik), KN (Institut für Kommunikation und Navigation), DFD/ZKI (Deutsches Fernerkundungsdatenzentrum), TS (Verkehrssystemtechnik) sowie den Industriepartnern Roboception GmbH, Sensodrive GmbH und Blickfeld GmbH, nahmen auch weitere potentielle Endnutzer, wie das Bayerische Rote Kreuz (BRK), Technische Hilfswerk (THW), Deutsches Zentrum für Rettungsrobotik (DRZ) und das Institut der Feuerwehr NRW teil.
Das Team der Sicherheitsforschung des BRK, Landesgeschäftsstelle München konnte zudem vor Ort einen detaillierten Einblick in den technischen Aufbau der Systeme gewinnen und wird das Nachfolgeprojekt MaiSHU (Multimodale Wahrnehmung und Mensch-Maschine-Schnittstellen teilautonomer intelligenter Systeme für humanitäre Hilfe in unsicheren und unstrukturierten Umgebungen) als Anwendungspartner begleiten und in Zukunft in einsatznahen Bedingungen erproben.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}