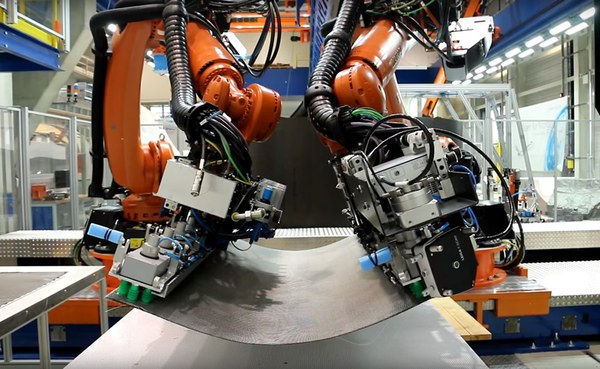
In aviation industry even nowadays a lot of processes dealing with the placing of large carbon fiber matrices are done by manual work. The use of robots paves the path for advances both in efficiency and in precision of those processes. First research which was conducted also at the Center for Lightweight-Production-Technology (CLP) of the German Aerospace Center (GAC) in Augsburg is concerned mainly with process specific problems and does not deal with scheduling and digitisation of the process. In particular, control of robot teams which are necessary to handle large carbon fiber matrices is a neglected topic.
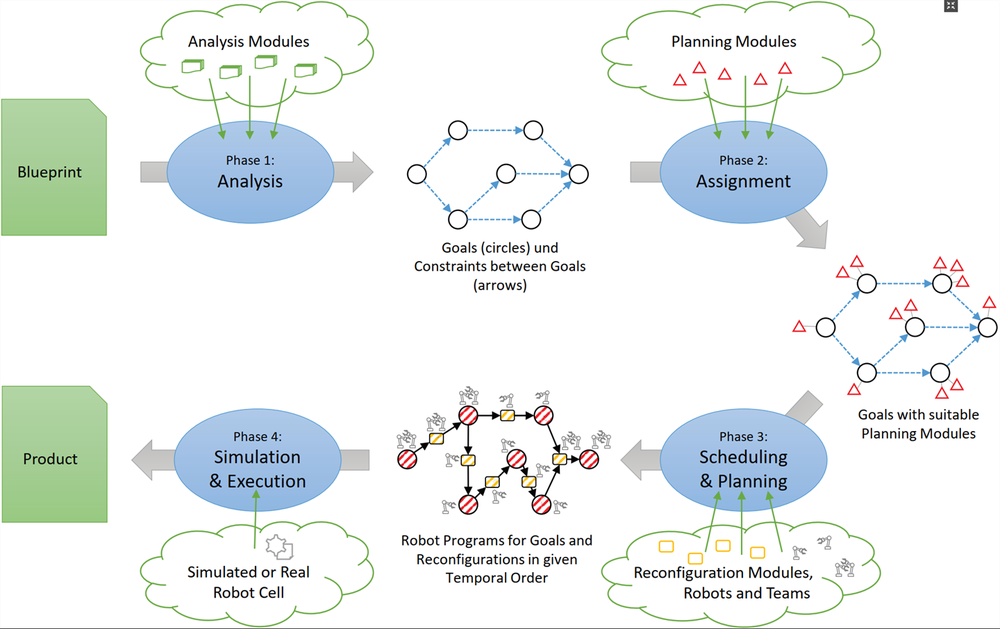
The project TeamBots aims to narrow this gap. It deals with the development of control concepts for robot teams in automation and is divided between the University of Augsburg and the Center for Lightweight-Production-Technology. According to its expertise, the contribution of the CLP was concerned with the topic of robot teams in the production of carbon fiber reinforced plastics. The goal of the project was, starting from a computer model of a component part, to generate actions for robot teams and to achieve a as high as possible degree auf automation.
The computer model consists essentially of information about the contours of the cuttings. These are represented both flat on a desk from where they are picked up and spatially in the mould where they are to be placed. This information can be used to determine positions where robots - with the help of suitable grippers – can pick the cuttings and place them into the mould. Moreover, the computer model poses certain restrictions on the order in which the cuttings have to be placed into the mould.
Using this information one can together with knowledge about available grippers of a production cell and their capabilities compute assignments which determine which robot or which robot team can process which cutting. Moreover, parallel actions may be possible, so one robot could drape a small cutting into the mould while another robot picks a small cut piece from the desk. Taking into account the restrictions about the order in which the cuttings have to be placed, these possible actions can be translated into concrete robot actions. The testing of this approach in reality is planned at the CLP in another project; here, the process was implemented in the modelling tool Blender and rendered into a video file.