The Institute of Flight Systems develops and researches algorithms and systems for mission and trajectory planning. This includes all phases of flights, from takeoff and cruise to landing and ground operations. The applications range from small unmanned aircraft through conventional helicopter to traditional airplanes. This requires that the problem be tailored to the specific application in terms of modelling approach, boundary constrains, optimization objectives, and data basis. While trajectory planning governs the detailed temporal planning of the aircraft’s movement in all six degrees of freedom, mission planning involves a more abstract evaluation of objectives as well as the definition of cost functions for trajectory planning.
Optimization Objectives and Constraints
Common optimization objectives in mission and trajectory planning from the perspective of an individual aircraft include factors such as flight time or fuel consumption. However, interactions with the environment can also be optimized, e.g., to reduce ground risk and noise emissions, or to enable efficient aerial imaging. With regard to constraints, the primary goal is to generate flyable and safe trajectories. This means that flight dynamics and where required, disturbances such as system failures, wind, or turbulence must be considered. In addition, collision and conflict avoidance must be ensured, both with static obstacles and near the ground (such as power lines or cranes) and with dynamic obstacles in the form of cooperative and non-cooperative air traffic. Therefore, especially at low altitudes, environmental factors such as critical infrastructure, areas with high ground risk, or non-fly zones are taken into consideration during planning. For long-distance flights, communication range and the availability of intermediate landing options become important factors.
Real-Time Planning
Real-time capable planning enables to adapt to unforeseen events such as weather changes, obstacles, or altered mission objectives. In contrast to static pre-planning, the recalculation of the flight path takes place during the flight and is performed on onboard systems, using in-flight data from sensors or communication systems. This dynamic adjustment ensures that the aircraft operates efficiently, safely, and purposefully, even in highly dynamic situations. Due to the complexity of the planning process and the limited computational resources available on board, achieving real-time capability presents a significant challenge. Research approaches to address this include the use of sampling-based algorithms, the parallelization of planning steps, and the precomputation of data structures that enable runtime-efficient planning.
Aircraft Configuration and Flight Dynamics
Planning for fixed-wing and rotary-wing aircraft differs fundamentally due to their distinct flight dynamics. Fixed-wing aircraft are characterized by high energy efficiency and long range but require a minimum flight speed and sufficient space for takeoff and landing. A key challenge in planning for fixed-wing aircraft is accounting for constraints such as minimum turning radii and maximum climb rates. Rotary-wing aircraft, on the other hand, offer great flexibility, as they can hover in place and take off and land vertically. They are ideal for operations in confined spaces or missions with complex requirements. By tailoring planning strategies to the type of aircraft, the performance potential of each platform can be optimally leveraged.
Data basis
In addition to a priori knowledge and semantic information from digital maps and terrain models, planning also relies on data from onboard environment perception systems using sensors (such as cameras: VIS, IR, LiDAR, radar) or communication sources from external service providers. In the context of unmanned flight and SORA (Specific Operation Risk Assessment), for example, routes can be calculated for unmanned systems that avoid areas of high population density. In the military context, research is also being conducted on algorithms for tactical low-level flight of helicopters, making use of terrain contours and natural cover.
Mission and trajectory planning for landing in wind farms
There are rules for flying in the wind farm regarding how to enter, navigate within, and exit the park. These regulations ensure safety and efficiency and must be considered during mission and trajectory planning.
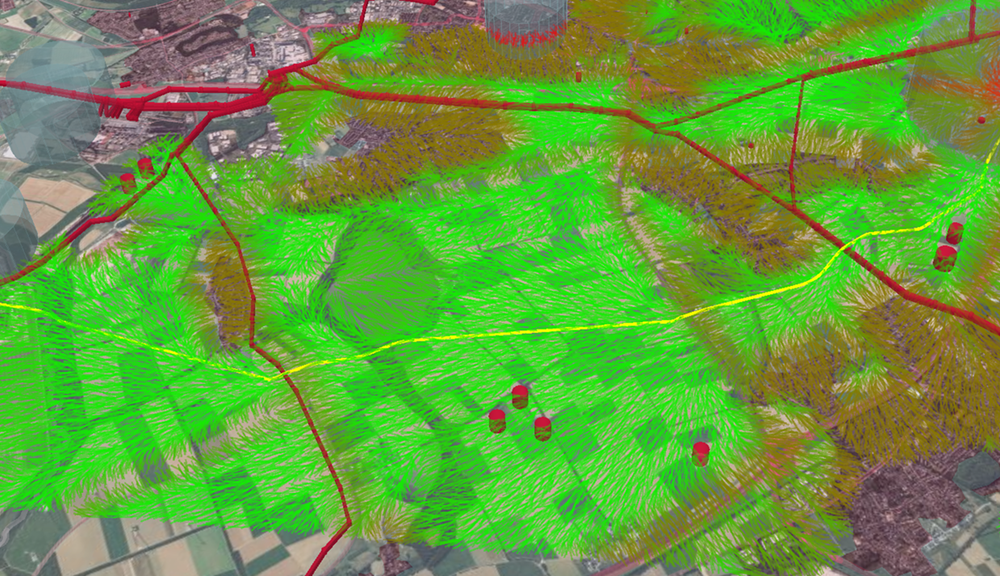
Visualization of a search graph in trajectory planning
The areas in green represent possible paths for trajectory planning. Red objects indicate obstacles that must be avoided, such as road or critical infrastructure.



{kind=link}
{kind=link}
{kind=link}