
Team: Hyperspektrale Fernerkundung
Das Team „Hyperspektrale Fernerkundung“ stellt Methoden und Produkte für bildgebende Sensoren auf Satelliten und Flugzeugen bereit.
Im Bereich von satellitengestützten Missionen werden operationelle vollautomatische Systeme zur Prozessierung von Bilddaten für Bodensegmente entwickelt. Aktuell werden diese Prozessketten für die deutsche hyperspektrale Mission EnMAP (Environmental Mapping and Analysis Program) sowie für die amerikanisch-deutsche hyperspektrale Mission DESIS (DLR Earth Sensing Imaging Spectrometer), installiert auf der ISS (International Space Station), eingesetzt. Die Verarbeitung dieser Bilddaten umfasst dabei die:
- Umwandlung der Daten in physikalische Messwerte. Hierzu werden neben den Prozessoren auch die notwendigen spektralen und radiometrischen Kalibrierungen basierend auf Equipment am Satelliten ausgewertet, aber zur Qualitätskontrolle auch essentielle Eigenschaften aus den Fernerkundungsdaten selbst analysiert.
- Georeferenzierung und Orthorektifizierung der Bilddaten. Diese werden dabei aus Sensor-Geometrie verzerrungsfrei in Kartenprojektionen abgebildet. Basierend auf der entwickelten Software ORTHO, werden dazu auch robuste Verfahren zur Verbesserung der Geolokation basierend auf Referenzbildern berücksichtigt.
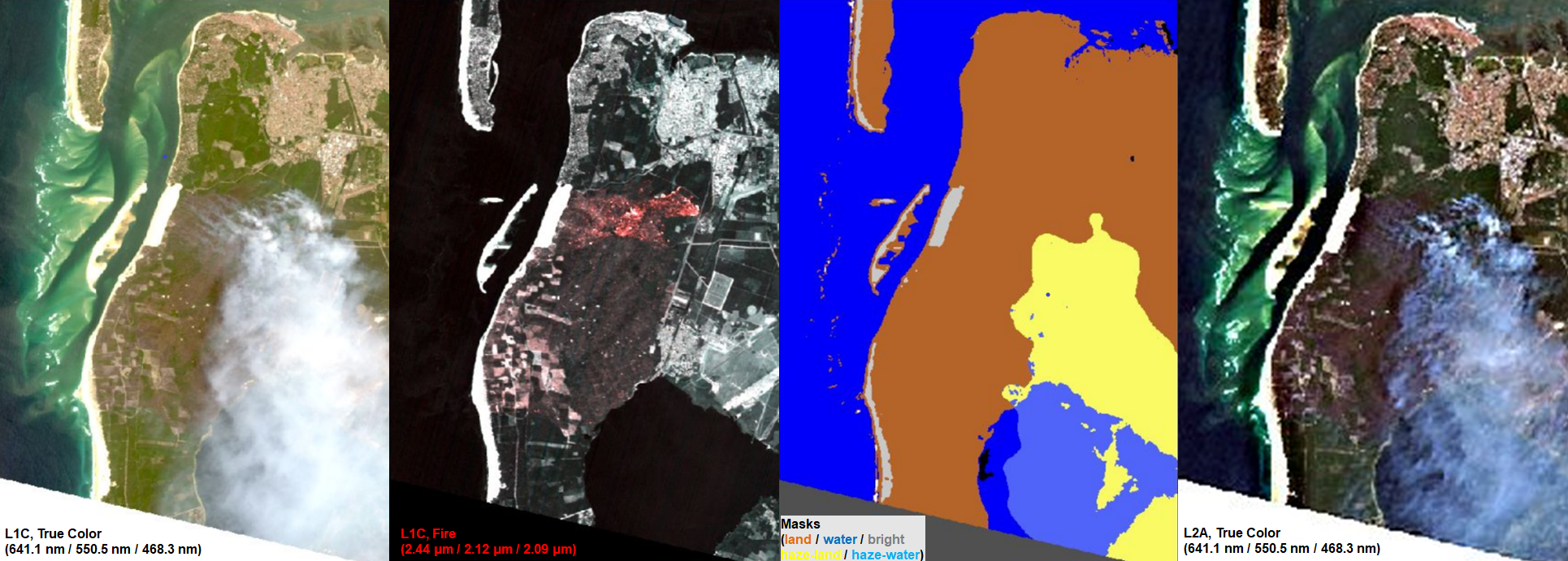
- Kompensation von atmosphärischen Einflüssen basierend auf der entwickelten Software PACO (Python-based Atmospheric COrrection), welche eine Vielzahl von Sensordaten im VIS/NIR- und SWIR-Spektralbereich verarbeitet und auch eine Klassifizierung etwa von Wolken, die präzise Ableitung der notwendigen Atmosphärenparameter wie Aerosol- und Wasserdampfgehalt zur Berücksichtigung beim Strahlungstransfer sowie eine Korrektur von Zirren umfasst.
Die dabei erstellten standardisierten Produkte bilden die Grundlage zur Ableitung höherwertiger Produkte für eine Vielzahl an Anwendungen. Im Team werden dazu für multi- und hyperspektrale Bilder und Zeitreihen von Bildern beispielsweise folgende Verfahren entwickelt:
- Grundlegende Algorithmen zur Differenzierung von (grüner und trockener) Vegetation und losem Oberboden. Diese liefert wertvolle Informationen beispielsweise zu Erosionsgefahren.
- Algorithmen zum Monitoring von Kulturerbe und anderen archäologischen Stätten.
- Algorithmen zur Erstellung von globalen Fluoreszenzkarten.
Derartige Verfahren werden unter Verwendung moderner Deep Learning-Techniken, spektraler Entmischungsverfahren auf Basis von Sparse Reconstruction-Techniken und durch neuartige Datenfusionen von multi- und hyperspektralen Daten zur Verbesserung der Auflösung realisiert.
Eine zu EnMAP und DESIS vergleichbare Prozesskette wird in CATENA für die flugzeuggetragene Mission HySpex genutzt.
Weitere Projekte entwickeln diese und andere Methoden für unterschiedliche zukünftige optische Missionen zur Erdoberflächenbeobachtung kontinuierlich weiter.

{kind=link}