
MoSeRoS


{kind=link}
{kind=link}

{kind=link}
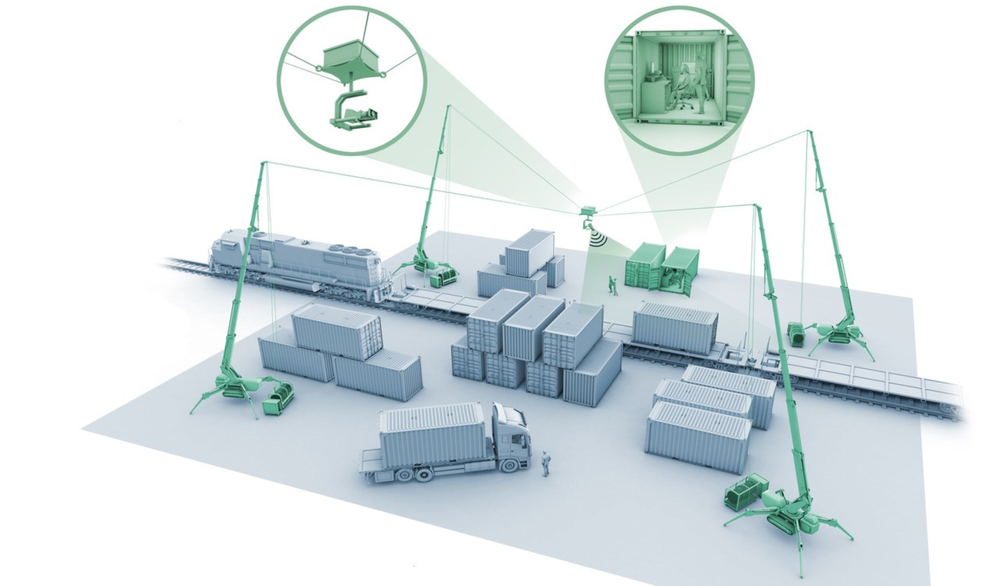
Mit der MoSeRoS-Anlage lassen sich große Flächen unkompliziert überwachen oder neuartige Technik testen. Dank Kettenfahrwerk lassen sich die Kräne auch in schwierigem Gelände nutzen.
Bei der MoSeRoS-Anlage handelt es sich um ein mobiles seilgetragenes robotisches Sensorerprobungssystem für die Ertüchtigung von unterschiedlichen Detektionssystemen. Sie basiert auf dem – aus Fußballstadien bekannten – „Spidercam“-Seilkamerasystem. Im Gegensatz zu den Festinstallationen in Stadien, ist MoSeRoS vollständig mobil einsetzbar und kann mehr als nur einfache Kameras tragen. Vier Mobilkräne spannen zusammen mit vier präzise gesteuerten Seilwinden den Arbeitsraum der Anlage auf. Die Flächendiagonale des Arbeitsraumes beträgt dabei bis zu 300 m. Die Seile tragen die vielseitig einsetzbare Plattform, die mit einer maximalen Flughöhe von 14 m ohne Abwind und nahezu lautlos, frei verflogen werden kann. Alle Komponenten der Anlage sind wetterfest, wasserdicht und temperaturstabil.
Die Anlage lässt sich über Dreiphasenwechselstrom (400 V) mit Energie versorgen. Der autarke Betrieb erfolgt bei Bedarf über einen integrierten Dieselgenerator. Für den Einsatz in schwierigem Gelände verfügen die Kräne über ein Kettenfahrwerk. Der Aufbau kann, abhängig vom Gelände, von zwei Mitarbeitern in etwa einem halben Tag durchgeführt werden.
Unterbrechungsfreie Stromversorgung und große Nutzlast
Ein besonderes Alleinstellungsmerkmal der Anlage ist die speziell für das DLR entwickelte Trägerplattform. Diese stellt der angebrachten Nutzlast eine stabile Energieversorgung (230 V, 2,7 kW) über in den Seilwinden geführte Leitungen zur Verfügung. Alternativ ist ein Akkubetrieb zugunsten größerer Spannweiten möglich. Hierfür sind jedoch regelmäßige Landungen zum Akkutausch nötig.
Die Anlage erlaubt es, Nutzlasten von bis zu 35 kg im aufgespannten Arbeitsraum dreidimensional zu positionieren. Ein Gimbal sorgt dafür, dass empfindliche Nutzlast (bis 15 kg), wie Laser-Emitter oder Kameras, schwingungsfrei unter der Plattform betrieben werden können. Dies ermöglicht die Erprobung sensibler Detektoren in einem frühen Entwicklungsstadium, ohne diese in aufwändigen Verfahren etwa für den Einsatz mit Drohnen zu optimieren. Zusätzlich können auch robuste Rechner integriert werden, die eine sensornahe Datenverarbeitung und -reduktion direkt auf der Plattform ermöglichen.
Datenübertragung und Anlagensteuerung
Die Trägerplattform ermöglicht den Abruf von Daten der installierten Detektionssysteme über eine 10 Gb Ethernet-Verbindung. Die Kommunikation mit der Bodenstation erfolgt zuverlässig und störungsfrei über Glasfaserleitungen, die in die Tragseile eingewoben sind.
Die gesamte Anlage kann manuell über einen Kontrollstand gesteuert, programmiert und überwacht werden. Alternativ zur händischen Steuerung bietet MoSeRoS eine TCP-basierte Netzwerkschnittstelle mit wohldefiniertem Protokoll und kann damit schnell und einfach durch gängige Programmiersprache wie etwa Python oder C++ automatisiert werden.
MoSeRoS auf einen Blick
• Diagonale bis zu 120 m (300 m im Akkubetrieb der Trägerplattform)
• Flughöhe bis zu 14 m (nutzlastabhängig)
• Nutzlast bis zu 35 kg (15 kg schwingungsfrei und bewegungsentkoppelt)
• Integriertes Dieselaggregat für autarke Energieversorgung im Feldeinsatz
• Abwindfreier und geräuscharmer Betrieb
• Schnelle und robuste Kommunikation mit Trägerplattform (10 GbE
Glasfaser)
• Manuelle und programmierbare Steuerung möglich
• Wetterfest und robust gegenüber Temperaturschwankungen
• Keine Aufstiegsgenehmigung für Deutschland notwendig
• Transport mittels zwei 20-Fuß-Seecontainern
• Aufbau in weniger als einem halben Tag möglich (gelände- und infrastrukturabhängig)