
Determination of detection probabilities of artificial objects in an arbitrary environment (vegetation, urban areas etc.)

Clutter from background objects |
. |
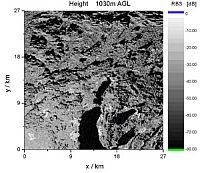
Figure 1: radar reflectivity map of the northern Ammersee region. The radar device is positioned in the lower left corner 1030m above ground level. |
How can the range of radar systems be determined? In order to be able to detect an object (e.g. car) reliably, the power scattered to the receiver must exceed a minimum level. The higher the noise, the lower the range at a given power setting. A great amount of this interference can be caused by the environment in which the object is embedded (cmp. right Figure); this portion is called (surface) clutter. Being an extended target, the (back)scattered power of clutter is proportional to the area covered by the radar signal; therefore specific backscattering or backscattering density is introduced to characterize the intrinsic scattering behaviour. To measure the scattered power is certainly the most exact method to determine the backscattering density, but an estimation of the expected clutter level by computer simulation offers several advantages:
- quick and comparably simple to perform,
- low costs,
- basically possible for any place on earth (even inaccessible regions),
- temporal changes (e.g. weather, season, vegetation height) can be taken into account,
- variation of radar parameters is possible (frequency, polarization, position, …),
- not only monostatic, but also bi- or multistatic radar configurations can be considered.
Because of these reasons the clutter simulation program DORTE (Detection of Objects in Realistic TErrain) is being developed in our group. For given radar positions the accessible areas as well as the local normal vectors can be determined using a Digital Elevation Model (DEM). Then statistical and semi-empirical clutter models are used to compute the expected backscattering densities. Caused by the random arrangement of point scatterers within each terrain cell a high variation of scattered intensity can be expected. This behaviour can be simulated by varying the computed values using distribution functions (Gauß, Weibull, Lognormal etc.) which have been determined experimentally or theoretically. The parameters of these functions can be dependent of a multitude of factors, as for example angle of incidence, wavelength, polarization, wind force and direction, humidity, roughness and season of year.
An example of a radar reflectivity map computed in this way is shown in Figure 1. The land use database CORINE of the European Environment Agency (EEA) has been utilized to assign different clutter models to the terrain cells.