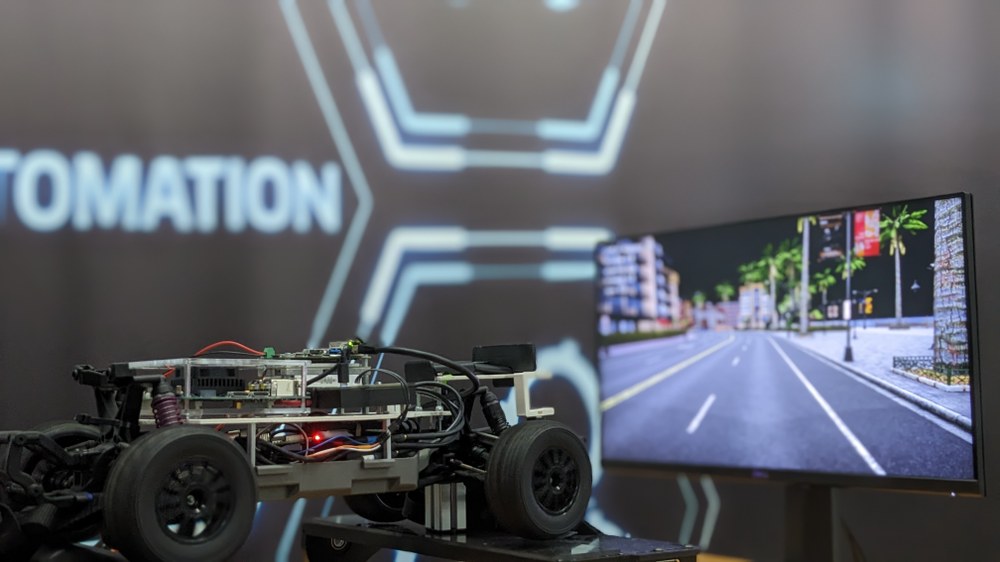
Beim Automotive Model Demonstration Evaluation and Verification Bed (AMDEV-Bed) handelt es sich um eine Entwicklungs- und Demonstrationsumgebung, die aus einem physischen Modellfahrzeug mit der notwendigen Sensorik und Aktorik auf einem Rollenprüfstand, einer Simulationsumgebung und einem Präsentationsmonitor besteht.
Das Fahrzeug verfügt über ein eingebettetes System, das so auch in realen Fahrzeugen verwendet wird. Es können unterschiedlichste Implementierungen sicherheitskritischer Fahrfunktionen ausgeführt werden. Der Rollenprüfstand simuliert die physischen Eigenschaften und Fahrbedingungen, sodass das Fahrzeug in einer kontrollierten Umgebung betrieben werden kann. Gleichzeitig wird eine Simulationsumgebung (CARLA) auf einem leistungsstarken Computer betrieben.
Mithilfe von CARLA, einer Open-Source-Simulationsumgebung, werden urbane Szenarien, Verkehrsbedingungen und verschiedene Wetterbedingungen erstellt und ausgeführt. Zwischen dem Modellfahrzeug und der Simulationsumgebung findet eine bidirektionale Kommunikation statt. Die Steuerbefehle der Fahrzeug-Aktorik werden in Echtzeit an CARLA übermittelt, während umgekehrt Perzeptionsinformationen von der Simulation mithilfe von realer Sensorik vom Modellfahrzeug verarbeitet werden. Diese Interaktion erfolgt über ein spezielles Interface (zum Beispiel mittels ROS 2).
Die Kopplung mit einer Simulationsumgebung wie CARLA auf einem Rollenprüfstand bietet mehrere Vorteile. Sie ermöglicht die Simulation komplexer und realistischer Verkehrsbedingungen, die in der realen Welt schwer zu reproduzieren wären. Durch die Kombination mit dem Rollenprüfstand kann das physische Verhalten des Fahrzeugs unter verschiedensten Bedingungen präzise getestet und analysiert werden.
Der Einsatz einer solchen Simulation schafft eine sichere und kontrollierte Umgebung, in der prototypische Fahrfunktionen implementiert und getestet werden können, bevor sie in reale Fahrzeuge integriert werden. Dadurch können potenzielle Fehler oder unerwünschtes Verhalten frühzeitig erkannt und behoben werden, ohne das Risiko realer Unfälle einzugehen.
Der Präsentationsmonitor bietet die Möglichkeit die internen Prozesse grafisch und didaktisch aufzubereiten und sie einem Publikum näher zu bringen.
Mithilfe des AMDEV-Beds können die folgenden Use-Cases demonstriert, evaluiert oder sogar verifiziert werden.
UseCase Sichere Updates:
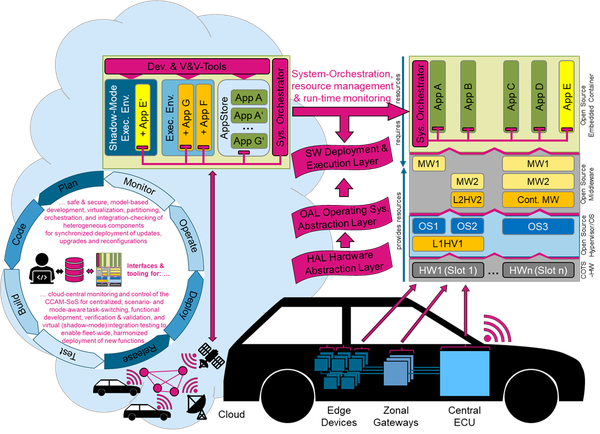
Zukünftige Fahrzeuge werden im Zuge der Transformation zum Software-defined Vehicle (SDV) zunehmend komplexer. Die Frequenz regelmäßiger Updates nimmt stetig zu. Bereits heute führen Fehler bei solchen Aktualisierungen zu erheblichen Kosten und aufwendigen Rückrufaktionen. Wenn in Zukunft Updates im laufenden Betrieb eines Fahrzeugs durchgeführt werden sollen, steigen die Anforderungen an diesen Prozess erheblich. Denn diese Updates müssen garantiert sicher funktionieren und genau zum richtigen Zeitpunkt durchgeführt werden.
In diesem Anwendungsfall wird anhand einer Fahrspurerkennung ein Update-Prozess inklusive einer Referenzarchitektur für modulare Software-Updates vorgestellt. Ein Software-Update-Management-System überprüft im Vorfeld, ob die Rechenplattform im Fahrzeug über die notwendigen Ressourcen für das Update verfügt, wie ausreichend Rechenleistung und Speicherplatz. Sind diese Voraussetzungen erfüllt, wird die neue Funktion auf die Rechenplattform des Fahrzeugs übertragen und dort installiert. Bevor die neue Funktion in Betrieb genommen wird, erfolgen weitere Laufzeittests direkt im Fahrzeug. Erst nach erfolgreichem Abschluss dieser Tests kann die Funktion freigeschaltet und genutzt werden.
UseCase Reinforcement Learning:
Die Simulationsumgebung CARLA wird als Trainingsumgebung für das Reinforcement Learning betrachtet. In dieser Umgebung kann das Modellfahrzeug unterschiedliche Szenarien durchlaufen, wie zum Beispiel Stadtverkehr, Autobahnfahrten oder Parkmanöver. Der RL-Agent interagiert mit der Simulationsumgebung und lernt durch einfaches ausprobieren, welche Aktionen in verschiedenen Situationen zu den höchsten Erfolgen führen. Das Training erfolgt in Iterationen, wobei der Agent kontinuierlich seine Strategien verbessert. Da die Simulation schneller als die Echtzeit ablaufen kann, ist das Training in der virtuellen Umgebung effizienter als in der realen Welt.