
PRISMA Formation Flying Mission
Overview

An increasing demand in scientific, technological and commercial applications of space assets will boost the use of multi-satellite systems in the near future. In this framework, PRISMA provides a technology demonstration mission for the in-flight validation of sensor technologies and guidance/navigation strategies for spacecraft formation flying and rendezvous. PRISMA is originating from an initiative of the Swedish National Space Board (SNSB) and the Swedish Space Corporation (SSC) and provides a precursor mission for critical technologies related to advanced formation flying and In-Orbit-Servicing.
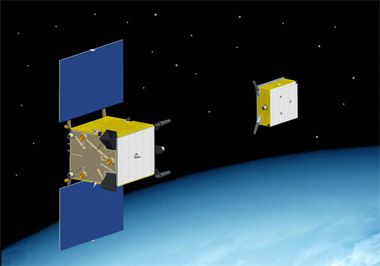
The PRISMA test bed comprises the fully maneuverable micro-satellite MAIN as well as the smaller passive sub-satellite TARGET (Fig. 1). The two spacecraft will be injected into a Sun-synchronous dusk-dawn orbit at an altitude of 700 km. The targeted lifetime of PRISMA amounts to at least eight months.
Mission Objectives
The mission objectives of PRISMA may be divided into the validation of sensor and actuator technology related to formation flying as well as the demonstration of experiments for formation flying and rendezvous. Key sensor and actuator components to be validated comprise
- a Vision-Based Sensor (VBS),
- two Formation Flying Radio-Frequency (FFRF) sensors and
- a High-Performance Green Propellant (HPGP) system.
These will support and enable the demonstration of
- autonomous formation flying,
- homing and rendezvous scenarios, as well as
- close range proximity operations.
Secondary mission objectives comprise the testing of new power control systems and the demonstration of autonomous orbit keeping of a single spacecraft.
GPS-based Navigation
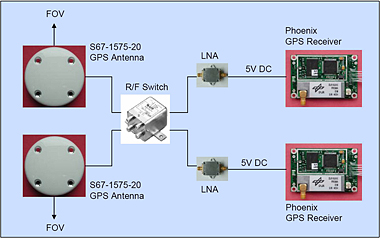
Within PRISMA, DLR/GSOC has assumed responsibility for providing a GPS-based onboard navigation system offering absolute and relative orbit information in real-time. To this end, each satellite will carry two independent GPS receivers for redundancy and coverage reasons. An intersatellite link will be applied to transmit GPS and telemetry data from the sub-satellite to the micro-satellite and to relay telecommands through the micro-satellite to the sub-satellite.
High-grade single-frequency Phoenix GPS receivers have been adopted for the mission. The receivers are based on a commercial-off-the-shelf hardware platform running DLR’s proprietary software. With a code tracking accuracy of better than 0.5 m and a carrier-phase accuracy of better than 1 mm at 45 dB-Hz, the Phoenix receivers outperform most other industrial GPS receivers for space applications. Furthermore, its low mass (50 g) and power consumption (0.8 W) renders Phoenix ideally suited for use on satellites with tight onboard resources.
Autonomous Formation Flying
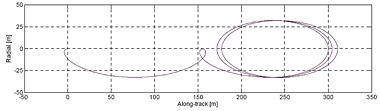
In addition to the GPS-based navigation system of the PRISMA mission, DLR contributes the Spaceborne Autonomous Formation Flying Experiment (SAFE). SAFE will demonstrate a fully autonomous, robust and precise formation flying of spacecraft. SAFE complements other PRISMA experiments and focuses on autonomous and fuel-optimized formation flying at representative distances of 100 to 2000 m. To this end, guidance and control algorithms based on an eccentricity and inclination vector separation strategy will be employed. This ensures a maximum operational safety in contingency cases and is ideally suited for future radar missions which realize a close formation flight.
Further Reading
PRISMA Web site at Swedish Space Corporation
Persson S., Jakobsson B., Gill E.;
PRISMA - Demonstration Mission for Advanced Rendezvous and Formation Flying Technologies and Sensors;
56th International Astronautical Congress (IAF), Fukuoka, Japan (2005).
Gill E., Montenbruck O., D'Amico S., Persson S.;
Autonomous Satellite Formation Flying for the PRISMA Technology Demonstration Mission;
16th AAS/AIAA Space Flight Mechanics Conference, Jan. 22-26 2006, Tampa, Florida (2006).
Persson S., Bodin P., Gill E., Harr J., Joergenson J.;
PRISMA - An Autonomous Formation Flying Mission;
Small Satellite Systems and Services - The 4S Symposium; 25-29 September 2006; Chia Laguna Sardinia, Italy (2006).
D'Amico S., Gill E., Montenbruck O.;
Relative Orbit Control Design for the PRISMA Formation Flying Mission;
AIAA Guidance, Navigation, and Control Conference, 21-24 Aug. 2006, Keystone, Colorado (2006).
D'Amico S., Montenbruck O.;
Proximity Operations of Formation Flying Spacecraft using an Eccentricity/Inclination Vector Separation;
AIAA Journal of Guidance, Control and Dynamics, 29/3 554-563 (2006).
Rupp T., D'Amico S., Montenbruck O., Gill E.;
Autonomous Formation Flying at DLR's German Space Operations Center (GSOC);
IAC-07-D1.2; 58th International Astronautical Congress; 24-28 Sept. 2007; Hyderabad, India (2007).
Gill E., D'Amico S., Montenbruck O.;
Autonomous Formation Flying for the PRISMA Mission;
AIAA Journal of Spacecraft and Rockets, 44/3, 671-681 (2007).
DOI 10.2514/1.23015