In the context of automated driving, the KI DeltaLearning project looks at self-learning methods for the automated processing of environmental sensor data (e.g. object recognition from image data). To this end, artificial intelligence methods (e.g. neural networks) are used to automatically determine the parameters required for pattern recognition and classification based on training data.
For the so-called "learning" of knowledge, a large amount of training data and thus test drives are required. For example, the typical "appearance" of road users (cars, pedestrians, etc.), obstacles (vegetation, buildings) and the traffic route (road surface, markings and traffic signs) in the camera image is learnt. The same can also be done for other sensors such as laser scanners.
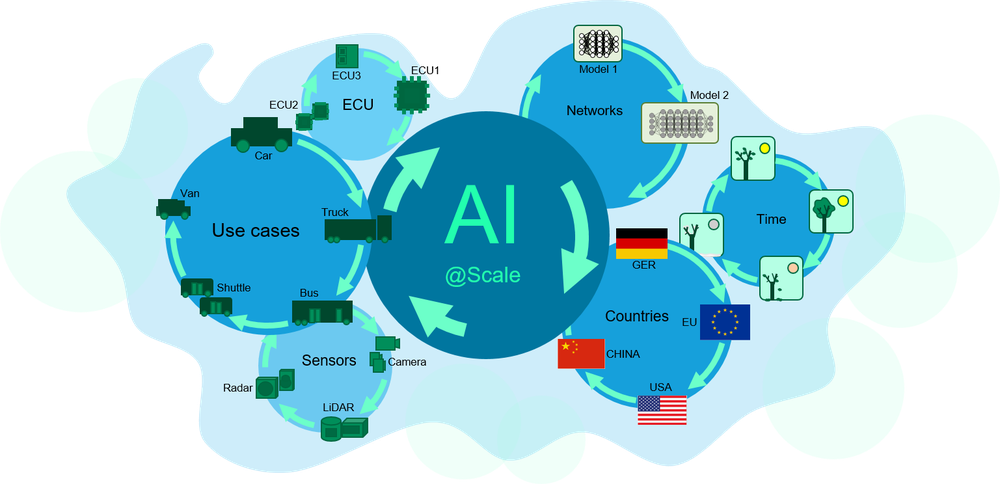
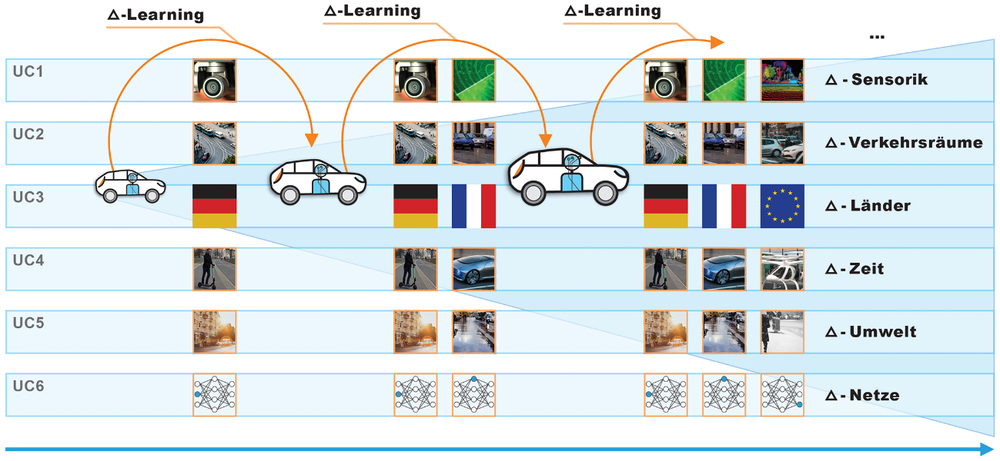
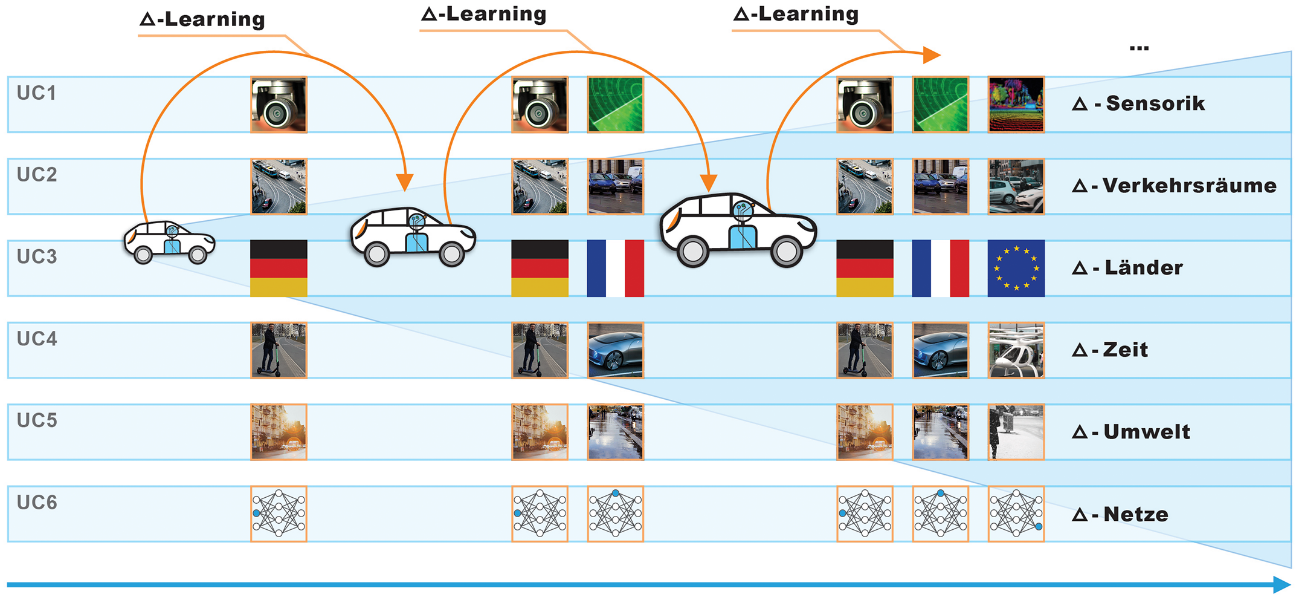
The aim of the scientists is to make the models derived from the data and test drives as universally usable as possible. For example, they should also be usable for other vehicle types, in other regions and under other weather and climatic conditions. This proves difficult because the "appearance" of the world differs depending on the viewing perspective (e.g. a higher camera position in the lorry), region (e.g. USA or Europe), or weather, time of year and time of day.
The research objective of KI DeltaLearning is to evaluate the essential differences and to design methods for how an artificial intelligence with existing knowledge only needs to relearn these specific "deltas". This reduces the need for test data and accelerates the learning process when new knowledge is to be added.
In the project, the consortium will equip its own vehicle to record sensor data and carry out trips to collect data. Some of the test drives will take place in the coverage area of the DLR research facilities in Braunschweig and Berlin, which will provide additional infrastructure data (e.g. camera images from a higher perspective).
Objectives of KI DeltaLearning: Starting from an existing data basis, research is to be carried out into how further data, e.g. from other sensors or other traffic areas, can be integrated into an AI system.


{kind=link}