Das ROMO ist ein einzigartiges Forschungsfahrzeug des DLR. Es dient als Technologie-Demonstrator und Forschungsplattform für Raumfahrt- und Verkehrs-Projekte rund um die Themen autonomes Fahren, Fahrdynamik, Steuerungstechnik sowie künstliche Intelligenz. Das erste robotische Elektrofahrzeug weltweit kann sich um die eigene Achse drehen, sich seitwärts und schräg fortbewegen. Möglich machen das sogenannte Radroboter mit 10 Elektromotoren.
Das innovative mechatronische Fahrwerk des ROboMObils basiert auf vier identischen Radrobotern, die jeweils einen Antriebsmotor sowie Brems-, Lenk- und Dämpfersysteme integrieren. Der Betrieb der Radroboter wird durch eine intelligente zentrale Fahrzeugregelung koordiniert. Dank der individuellen Radlenkung verfügt das ROboMObil über eine beeindruckende Manövrierfähigkeit, die sogar seitliches Fahren oder Drehen auf der Stelle ermöglicht. Diese Flexibilität zeigt sein volles Potenzial im städtischen oder logistischen Kontext.
Das ROboMObil kann vollständig manuell, teilautomatisiert oder vollautomatisch betrieben werden. Die gewünschte Bewegung des Fahrzeugs kann vom Fahrer über einen Force-Feedback-Sidestick mit drei Freiheitsgraden kommandiert werden. Die intelligente Pfadfolgeregelung unterstützt die letztgenannten Modi, indem sie das automatische Abfahren eines vordefinierten Pfades innerhalb begrenzter Korridore ermöglicht.
Simulationswerkzeuge spielen sowohl bei der Entwicklung als auch bei der Validierung von Fahrzeugregelungsfunktionen eine zentrale Rolle. Zu diesem Zweck bietet unsere virtuelle Design- und Testumgebung vollständige, detaillierte Fahrzeugmodelle unter Verwendung der objektorientierten Modellierungssprache Modelica. Neben der Mehrkörperdynamik umfassen diese Modelle auch Sensoren und elektromechanische Aktuatoren. So werden verschiedene Bereiche wie Mechanik, Elektrik und Hydraulik in einem Modell kombiniert. Neuartige Werkzeugketten zielen darauf ab, aus den entwickelten Regelungsalgorithmen automatisch Code für seriennahe Steuergeräte zu generieren.
Kurz gesagt, das ROboMObil bietet eine flexible Plattform für die Erforschung integrierter Regelungs- und Schätzalgorithmen für Energiemanagement und Fahrzeugdynamik, sowie KI-basierter Regelung und autonomen Fahren.
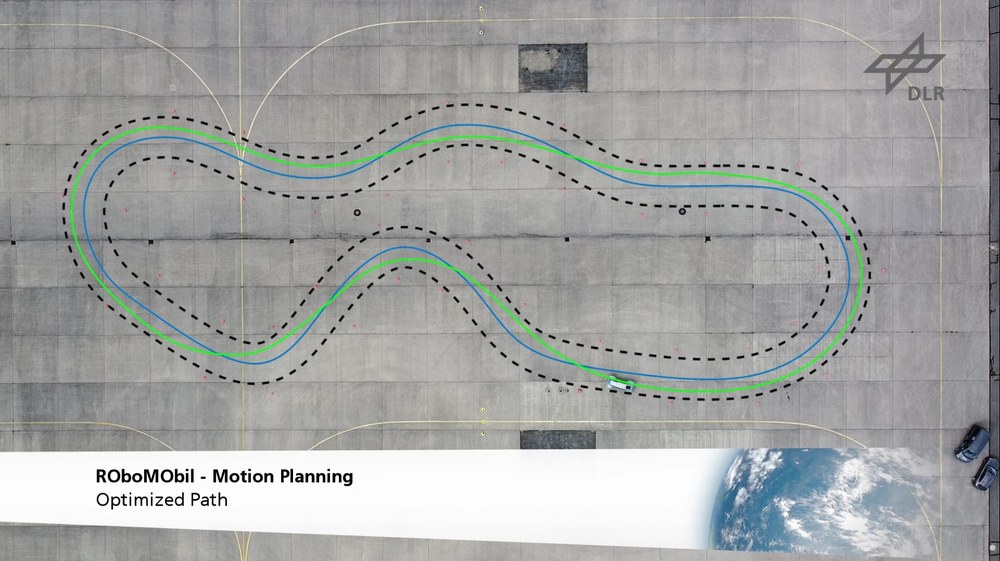
Durchgeführte experimentelle Testfahrten mit dem ROboMObil zeigen das Energiesparpotential von optimierten Pfaden und Geschwindigkeitsprofilen. Auf dem ADAC-Testgelände in Penzing wurden ein optimierter und ein nicht-optimierter Pfad mit unterschiedlichen Geschwindigkeitsprofilen unter Verwendung der ROboMObil-Bahnverfolgungssteuerung verfolgt. Die Geschwindigkeitsprofile wurden mit Hilfe der Dynamischen Programmierung optimiert und der Kompromiss zwischen energie- und zeitoptimaler Bewegung untersucht. Die Auswertung des Stromverbrauchs der Fahrzeuge zeigt Energieeinsparungen von bis zu 20 % bei nur 10 % längerer Fahrzeit auf der dargestellten Strecke.
ROboMObil - Bewegungsplanung
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
ROboMObil - Bewegungsplanung
Durchgeführte experimentelle Testfahrten mit dem ROboMObil zeigen das Energiesparpotential von optimierten Pfaden und Geschwindigkeitsprofilen. Auf dem ADAC-Testgelände in Penzing wurden ein optimierter und ein nicht-optimierter Pfad mit unterschiedlichen Geschwindigkeitsprofilen unter Verwendung der ROboMObil-Bahnverfolgungssteuerung verfolgt. Die Geschwindigkeitsprofile wurden mit Hilfe der Dynamischen Programmierung optimiert und der Kompromiss zwischen energie- und zeitoptimaler Bewegung untersucht. Die Auswertung des Stromverbrauchs der Fahrzeuge zeigt Energieeinsparungen von bis zu 20 % bei nur 10 % längerer Fahrzeit auf der dargestellten Strecke.