Die GNSS High Precision Orbit Determination Software Tools (GHOST) sind ein leistungsstarkes Softwarepaket für die Verarbeitung von Beobachtungen von weltraumgestützten und terrestrischen GNSS-Empfängern. Ein Schwerpunkt ist dabei die GNSS-basierte präzise Orbitbestimmung (POD) von Satelliten im niedrigen Erdorbit (LEO). GHOST umfasst verschiedene Module für die Datenvorverarbeitung, die kinematische Positionierung und die reduzierte dynamische Bahnbestimmung unter Verwendung von weltraumgestützten GNSS-Messungen. Satelliten-Laserentfernungsdaten können darüber hinaus für die Validierung der Satellitenbahnen verwendet werden. Darüber hinaus bietet GHOST eine Reihe von Werkzeugen zur Datenkonvertierung, zum Resampling und zur Visualisierung.
Alle Programme basieren auf einer gemeinsamen Bibliothek von C++-Modulen für die Verarbeitung von GNSS-Daten, Bahnmodellierung und die Schätzung von Satellitenbahnen. Die GHOST-Bibliothek und die Anwendungsprogramme wurden vom Deutschen Raumfahrt-Kontrollzentrum des DLR (DLR/GSOC) in enger Zusammenarbeit mit dem Delft Institute of Earth Observation and Space Systems (DEOS) der TU Delft entwickelt.
Bahnbestimmung
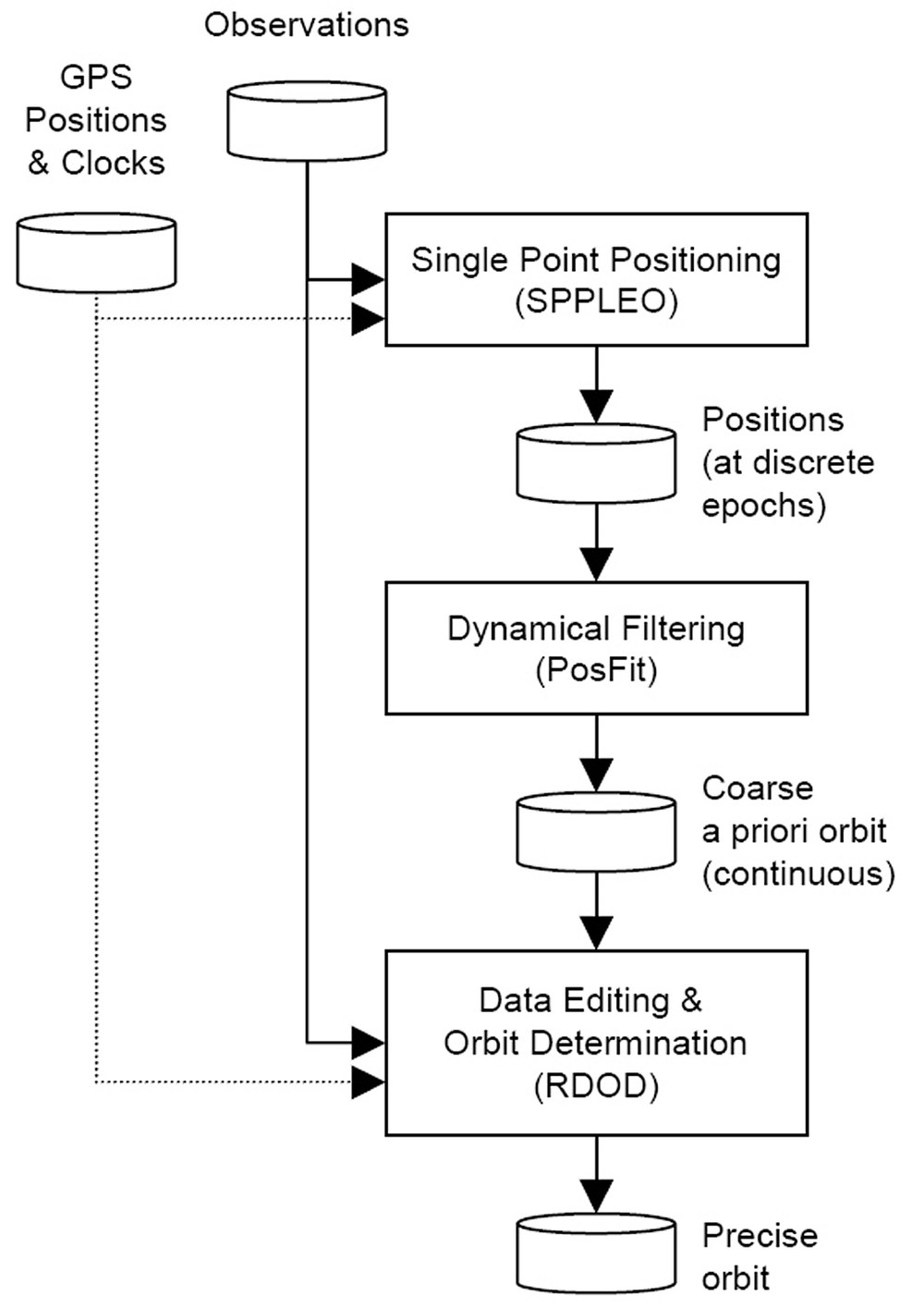
GHOST-Verarbeitungsschema für die dynamische Bestimmung der Umlaufbahn von LEO-Satelliten
Die GHOST-Programmsammlung besteht aus einzelnen Tools, die vom Benutzer frei kombiniert werden können, um ein missionsspezifisches Verarbeitungsschema zu implementieren. Alle Programme arbeiten in einem nicht-interaktiven Modus, was ihre Verwendung in Skript-basierten Verfahren und die Einrichtung automatisierter Verarbeitungsketten erleichtert.
Bei einer LEO- Bahnbestimmung werden die folgenden Schritte in der Regel nacheinander ausgeführt:
Zunächst werden die Näherungsposition und der Uhrenoffset zu jeder Epoche aus den beobachteten Pseudoranges mit dem SPP-Programm (Single Point Positioning) bestimmt. Je nach verfügbarem Empfänger haben diese Ergebnisse eine typische Genauigkeit zwischen 3 m (Zweifrequenz) und 10 m (Einfrequenz). Optional kann mit SPP auch die Geschwindigkeit und die Uhrendrift aus den Doppler-Messungen bestimmen.
Die groben Positionsbestimmungen werden anschließend durch das Programm PosFit geglättet, das eine Trajektorie mit reduzierter Dynamik unter Verwendung der Positionen als Pseudobeobachtungen anpasst. Die resultierende Trajektorie kann bereits eine Genauigkeit von 0,2-2 m erreichen, dient aber in erster Linie als Referenz für die Daten in den folgenden Verarbeitungsschritten.
Die eigentliche präzise Bahnbestimmung wird mit dem Programm RDOD (Reduced Dynamics Orbit Determination) durchgeführt. Unter Verwendung des a priori Orbits als Referenz werden die Code- und Trägerphasenmessungen zunächst auf Ausreißer und schlechte Daten hin überprüft. Die Bahn des Satelliten wird mit Hilfe eines präzisen dynamischen Modells mit zusätzlichen empirischen Beschleunigungsparametern modelliert, die zusammen mit epochenweisen Uhrenparametern und Pass-spezifischen Biases in einer gemeinsamen kleinste-Quadrate-Ausgleichung geschätzt werden. Mehrdeutigkeiten können dabei fixiert werden wenn geeignete Bias- und Uhrenprodukte verwendet werden. Wenn die Mehrdeutigkeiten fixiert werden können mit diesem Verfahren Bahngenauigkeiten von etwa 1-2 Zentimetern erreicht werden.
Weitere Werkzeuge
Werkzeug
Beschreibung
BCEcmp, EphCmp
Vergleich von Ephemeriden
DINO
GNSS-basierte differentielle Navigation
FRNS
Filter für die Relativnavigation von Satelliten
IONDCB
Schätzung von differentiellen Code Biases mit globalen Ionosphärenkarten
KIPP
Kinematische Punktpositionierung
MCP
Präzise Punktpositionierung mit mehreren Konstellationen
Hauschild, A; Montenbruck, O; Steigenberger, P; Martini, I; Fernandez-Hernandez, I. 2022. Orbit determination of Sentinel-6A using the Galileo High Accuracy Service test signal. GPS Solutions 26(4). DOI: https://doi.org/10.1007/s10291-022-01312-5.
Montenbruck, O; Hackel, S; Wermuth, M; Zangerl, F. 2021. Sentinel-6A precise orbit determination using a combined GPS/Galileo receiver. Journal of Geodesy 95(9). DOI: https://doi.org/10.1007/s00190-021-01563-z.
Montenbruck, O; Kunzi, F; Hauschild, A. 2021. Performance assessment of GNSS-based real-time navigation for the Sentinel-6 spacecraft. GPS Solutions 26(1). DOI: https://doi.org/10.1007/s10291-021-01198-9.
Allende-Alba, G; Montenbruck, O; Hackel, S; Tossaint, M. 2018. Relative positioning of formation-flying spacecraft using single-receiver GPS carrier phase ambiguity fixing. GPS Solutions 22(3). DOI: https://doi.org/10.1007/s10291-018-0734-x.
Montenbruck, O; Hackel, S; van den Ijssel, J; Arnold, D. 2018. Reduced dynamic and kinematic precise orbit determination for the Swarm mission from 4 years of GPS tracking. GPS Solutions 22(3). DOI: https://doi.org/10.1007/s10291-018-0746-6.
Montenbruck, O; Hauschild, A; Steigenberger, P. 2014. Differential Code Bias Estimation using Multi-GNSS Observations and Global Ionosphere Maps. Navigation: Journal of the Institute of Navigation 61(3):191–201. DOI: https://doi.org/10.1002/navi.64.
Wermuth, M.; Montenbruck, O. & van Helleputte, T. (2010). GPS High Precision Orbit Determination Software Tools (GHOST). 4th International Conference on Astrodynamics Tools and Techniques. Elib https://elib.dlr.de/74046/1/Wermuth_et_al%282010%29.pdf
Kontakt
Dr.-Ing. Benjamin Braun
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Raumflugbetrieb und Astronautentraining
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling