The GNSS High Precision Orbit Determination Software Tools (GHOST) are a powerful software package for processing observations of space-borne and terrestrial GNSS receivers. One of its core capabilities is the GNSS-based precise orbit determination (POD) of satellites in low Earth orbit (LEO). GHOST comprises different modules for data preprocessing, kinematic positioning and reduced dynamic orbit determination using spaceborne GNSS measurements. Satellite laser ranging data can, furthermore, be processed for orbit validaton purposes. Furthermore, GHOST offers a variety of tools for data conversion, resampling and plotting.
All programs build up on a common library of C++ modules for GNSS data processing, spacecraft trajectory modeling, and estimation. The GHOST library and application programs have been developed by DLR's German Space Operations Center (DLR/GSOC) in close cooperation with the Delft Institute of Earth Observation and Space Systems (DEOS) at TU Delft.
Orbit Determination
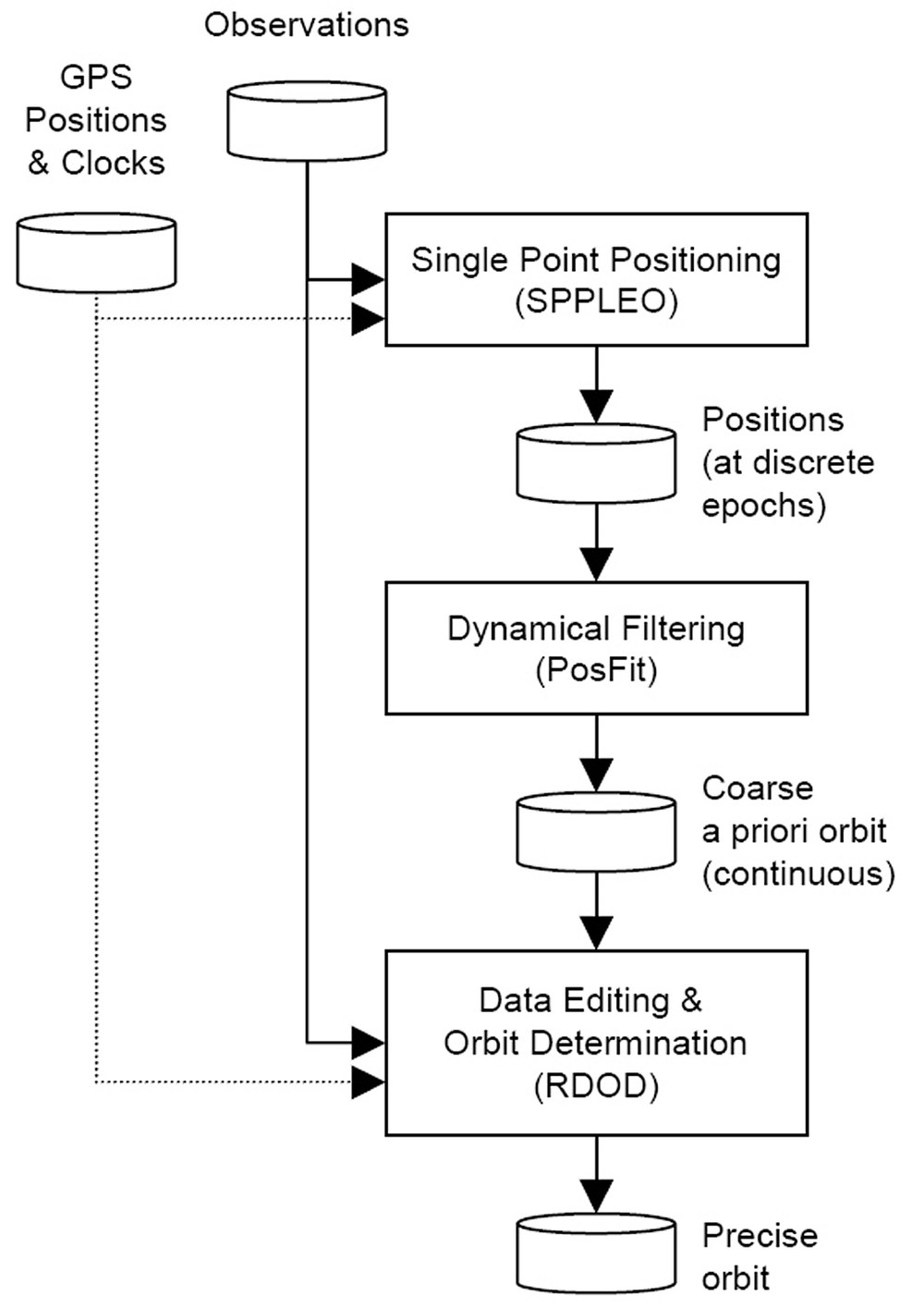
GHOST processing scheme for reduced dynamic orbit determination of LEO satellites
The GHOST suite is made up of individual tools that can freely be combined by the user to implement a mission-specific processing scheme. All programs operate in a non-interactive mode which facilitates their use in script-based procedures and the setup of automated processing chains.
For a LEO POD, the following steps are typically performed in sequence:
Initially, the coarse position and clock offset at each epoch are determined from the observed pseudoranges using the SPP (Single Point Positioning) program. Depending on the available receiver, the results have a typical accuracy between 3 m (dual-frequency) and 10 m (single-frequency). Optionally, SPP can also determine the velocity and clock drift at each epoch from Doppler measurements.
The coarse position fixes are subsequently smoothed by the PosFit program, which adjusts a reduced-dynamics trajectory using the positions as pseudo-measurements. The resulting trajectory can already achieve an accuracy of 0.2-2 m but serves primarily as a reference for the data in the following processing steps.
The actual precise orbit determination is carried out in the RDOD (Reduced Dynamics Orbit Determination) program. Using the a priori orbit as a reference, the code and carrier phase measurements are initially screened for outliers and bad data. The spacecraft trajectory is modeled using a concise dynamically model with supplementary empirical acceleration parameters that are adjusted along with epoch wise clock offsets and pass-by-pass biases in a large least-squares process. Ambiguities can be fixed to integers if appropriate bias and clock products are used. When fixing ambiguities, position accuracies down to the level of 1-2 centimeters can be achieved in this orbit determination process.
Other Tools
Tool
Description
BCEcmp, EphCmp
Ephemerides comparison
DINO
GNSS-based differential navigation in low earth orbit
FRNS
Filter for relative navigation of satellites
ONDCB
Estimation of differential code biases with global ionosphere maps
Hauschild, A; Montenbruck, O; Steigenberger, P; Martini, I; Fernandez-Hernandez, I. 2022. Orbit determination of Sentinel-6A using the Galileo High Accuracy Service test signal. GPS Solutions 26(4). DOI: https://doi.org/10.1007/s10291-022-01312-5.
Montenbruck, O; Hackel, S; Wermuth, M; Zangerl, F. 2021. Sentinel-6A precise orbit determination using a combined GPS/Galileo receiver. Journal of Geodesy 95(9). DOI: https://doi.org/10.1007/s00190-021-01563-z.
Montenbruck, O; Kunzi, F; Hauschild, A. 2021. Performance assessment of GNSS-based real-time navigation for the Sentinel-6 spacecraft. GPS Solutions 26(1). DOI: https://doi.org/10.1007/s10291-021-01198-9.
Allende-Alba, G; Montenbruck, O; Hackel, S; Tossaint, M. 2018. Relative positioning of formation-flying spacecraft using single-receiver GPS carrier phase ambiguity fixing. GPS Solutions 22(3). DOI: https://doi.org/10.1007/s10291-018-0734-x.
Montenbruck, O; Hackel, S; van den Ijssel, J; Arnold, D. 2018. Reduced dynamic and kinematic precise orbit determination for the Swarm mission from 4 years of GPS tracking. GPS Solutions 22(3). DOI: https://doi.org/10.1007/s10291-018-0746-6.
Montenbruck, O; Hauschild, A; Steigenberger, P. 2014. Differential Code Bias Estimation using Multi-GNSS Observations and Global Ionosphere Maps. Navigation: Journal of the Institute of Navigation 61(3):191–201. DOI: https://doi.org/10.1002/navi.64.
Wermuth, M.; Montenbruck, O. & van Helleputte, T. (2010). GPS High Precision Orbit Determination Software Tools (GHOST). 4th International Conference on Astrodynamics Tools and Techniques. Elib https://elib.dlr.de/74046/1/Wermuth_et_al%282010%29.pdf
Contact
Dr.-Ing. Benjamin Braun
German Aerospace Center (DLR)
Space Operations and Astronaut Training
Spaceflight Technology
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling