
Motion Planning
Image-based control and artificial intelligence agents


The top layer of the scalable vehicle dynamics control architecture is a generic applicationlayer that includes interactive driving, remote control of the vehicle and semi- or fully autonomous driving. For the latter, motion planning is required as a component. Research activities in this area mainly include image-based control and artificial intelligence agents, online path planning, path following control and cooperative vehicle following control.
As an intelligent robotic vehicle, the ROboMObil belongs to the class of artificial intelligence agents. Compared to conventional vehicles that have been converted for autonomous driving, two features of the ROboMObil can be emphasised: Firstly, the high manoeuvrability and secondly, the focus on cameras as perception sensors. Within the application layer, the ROboMObil has a hybrid autonomy architecture consisting of a (reactive) task-based and a classic hierarchical component. Parking in a narrow, urban environment is predestined to demonstrate the high manoeuvrability of the ROboMObil. All three movement modes (longitudinal, lateral and rotation-based) are suitable for this task. For this purpose, an approach for autonomous parking was developed, evaluated and tested in driving trials. The artificial intelligence of the ROboMObil is based on image-based control approaches, which offer great potential for fast reaction times and increased robustness by explicitly incorporating sensor characteristics. The first approach in this class is a direct approach for relative positioning. This method has been further improved and modified for vehicle tracking control based on a single monocular camera. In addition, a second essential functionality was developed: reactive avoidance of static and moving objects (see figure below).
Online path planning and path following

{kind=link}
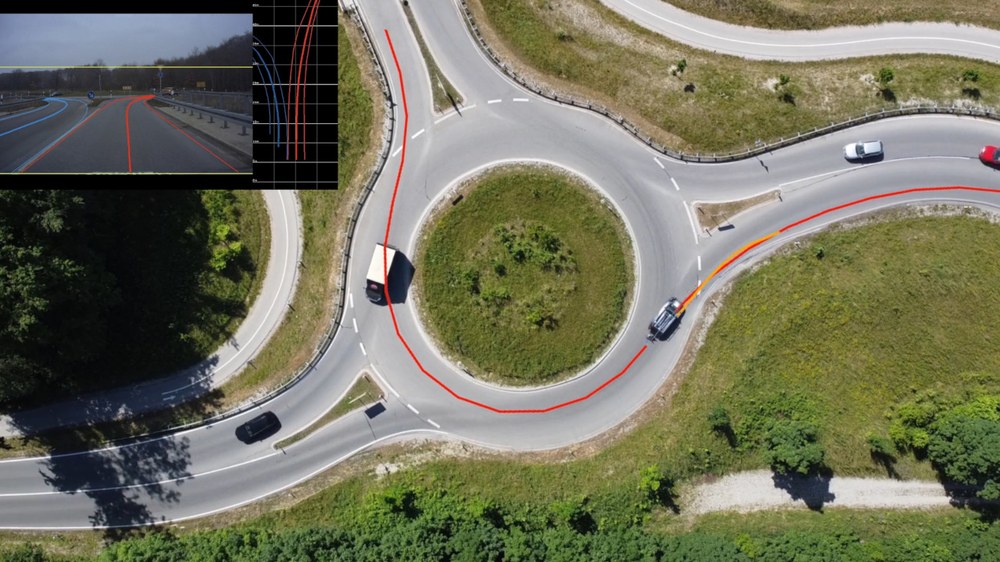
The Institute's concept for planning the motion requirement and generating control variables for the vehicle's motion control is based on a two-stage approach. In the first step, a smooth path for high driving comfort is planned. The real-time OPP is based on an efficiently solvable optimisation problem that minimises the curvature of the path, represented by splines, within given road boundaries (see figure below). In addition, the sliding horizon of the OPP enables the optimisation to take environmental changes into account. The energy saving potential of the OPP for travelling a given path with an electric vehicle was quantified experimentally.
In the second step, the speed profile is optimised over the planned path in order to find a compromise between time and energy optimisation. This compromise can be chosen directly by the driver. Dynamic programming is used to find the global optimum of the complex optimisation problem with non-linear constraints resulting from the physical limits of the vehicle. The optimisation of the speed profile can take into account changes in the environment. The planned path together with the velocity profile is then provided as input for the PFC. A non-linear model-based PFC combines a geometric, i.e. time-independent, formulation with monitoring of the target values. Based on a geometric vehicle model, the monitoring limits the setpoint specifications if necessary in order to ensure the solvability of the path following problem. The algorithm enables predefined paths to be followed with high accuracy and ensures vehicle stability in all relevant vehicle states. The framework was extensively tested and validated in real driving tests with the automated ROboMObil. In addition, a framework for alternative learning-based control approaches was developed within the institute. The method used is based on model-free reinforcement learning (RL), which identifies the control law from interaction with the system to be controlled. The training process uses multi-physical models, e.g. a highly accurate vehicle model implemented in Modelica (see figure below). In order to integrate the system dynamics into the Python-based RL framework, the multiphysical model is integrated as an FMU.
Combination of AI-based Path Detection and Highly Accurate GPS Data
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.