
Bewegungsplanung
Bildbasierte Regelung und Artificial Intelligence Agents


Die oberste Schicht der skalierbaren Fahrdynamikregelungsarchitektur bildet eine generische Anwendungsschicht, welche interaktives Fahren, Fernsteuerung des Fahrzeugs und semi- oder voll autonomes Fahren beinhaltet. Für Letzteres wird die Bewegungsplanung als Komponente benötigt. Auf diesem Gebiet umfassen die Forschungsaktivitäten hauptsächlich bildbasierte Regelung und Agenten mit künstlicher Intelligenz (artificial intelligence agents), online Bahnplanung, Pfadfolgeregelung und kooperative Fahrzeugfolgeregelung.
Als intelligentes robotisches Fahrzeug gehört das ROboMObil zur Klasse der Agenten mit künstlicher Intelligenz (artificial intelligence agents). Im Vergleich zu herkömmlichen Fahrzeugen, welche für autonomes Fahren umgerüstet wurden, können beim ROboMObil zwei Merkmale herausgestellt werden: Erstens die hohe Manövrierbarkeit und zweitens, der Schwerpunkt auf Kameras als Perzeptionssensoren. Innerhalb der Anwendungsschicht beinhaltet das ROboMObil eine hybride Autonomiearchitektur, welche aus einem (reaktiven) aufgabenbasierten und einem klassischen hierarchischem Anteil besteht. Das Einparken in einer engen, urbanen Umgebung ist prädestiniert um die hohe Manövrierbarkeit des ROboMObils zu demonstrieren. Für diese Aufgabe sind alle drei Bewegungsmodi (longitudinal, lateral und rotationsbasiert) geeignet. Hierfür wurde ein Ansatz für autonomes Parken entwickelt, evaluiert und in Fahrversuchen getestet. Als Basis für die künstliche Intelligenz des ROboMObils dienen bildbasierte Regelungsansätze, welche ein großes Potential für schnelle Reaktionszeiten und gesteigerte Robustheit, durch explizites Einbeziehen von Sensoreigenschaften bieten. Den ersten Ansatz dieser Klasse stellt ein direkter Ansatz für die relative Positionierung dar. Diese Methode wurde weiter verbessert und für Fahrzeugfolgeregelung, basierend auf nur einer monokularen Kamera modifiziert. Darüber hinaus wurde eine zweite essentielle Funktionalität entwickelt: reaktives Ausweichen von statischen und bewegten Objekten (siehe Abbildung unten).
Online Bahnplanung und Pfadfolgeregelung

{kind=link}
Das Konzept des Instituts für die Planung der Bewegungsanforderung und die Generierung von Steuergrößen für die Bewegungsregelung des Fahrzeugs basiert auf einem zweistufigen Ansatz. Im ersten Schritt wird ein glatter Pfad für hohen Fahrkomfort geplant. Die echtzeitfähige OPP basiert auf einem effizient lösbaren Optimierungsproblem, welches die Krümmung des Pfades, dargestellt durch Splines, innerhalb vorgegebener Straßengrenzen minimiert (siehe Abbildung unten). Darüber hinaus ermöglicht es der gleitende Horizont des OPP der Optimierung Umweltveränderungen zu berücksichtigen. Das Energieeinsparungspotenzial durch die OPP für das Befahren eines vorgegebenen Pfades mit einem Elektrofahrzeug wurde experimentell quantifiziert.
Im zweiten Schritt wird eine Optimierung des Geschwindigkeitsprofils über dem geplanten Pfad durchgeführt, um einen Kompromiss zwischen Zeit- und Energieoptimalität zu finden. Dieser Kompromiss kann direkt vom Fahrer gewählt werden. Mit Hilfe von dynamischer Programmierung wird das globale Optimum des komplexen Optimierungsproblems mit nichtlinearen Beschränkungen, welche aus den physikalischen Grenzen des Fahrzeugs resultieren, gefunden. Dabei kann die Optimierung des Geschwindigkeitsprofils Änderungen in der Umgebung berücksichtigen. Anschließend wird der geplante Pfad zusammen mit dem Geschwindigkeitsprofil als Eingabe für die PFC bereitgestellt. Eine nichtlineare modellbasierte PFC kombiniert hierbei eine geometrische, das heißt zeitunabhängige Formulierung mit einer Überwachung der Sollwertvorgaben. Basierend auf einem geometrischen Fahrzeugmodell begrenzt die Überwachung bei Bedarf die Sollwertvorgaben, um die Lösbarkeit des Pfadfolgeproblems sicherzustellen. Der Algorithmus ermöglicht es vordefinierten Pfaden mit hoher Genauigkeit zu folgen und gewährleistet die Fahrzeugstabilität in allen relevanten Fahrzeugzuständen. Das Framework wurde ausführlich getestet und in realen Fahrversuchen mit dem automatisierten ROboMObil validiert. Darüber hinaus wurde innerhalb des Instituts wurde ein Framework für alternative lernbasierte Regelungsansätze entwickelt. Die verwendete Methode basiert auf modellfreiem bestärkendem Lernen (reinforcement learning - RL), welche das Regelgesetz aus Interaktion mit dem zu regelndem System identifiziert. Der Trainingsprozess verwendet multiphysikalische Modelle, z.B. ein in Modelica implementiertes hochgenaues Fahrzeugmodell (siehe Abbildung unten). Um die Systemdynamik in das Python-basierte RL-Framework einzubinden, wird das multiphysikalische Modell als FMU integriert.
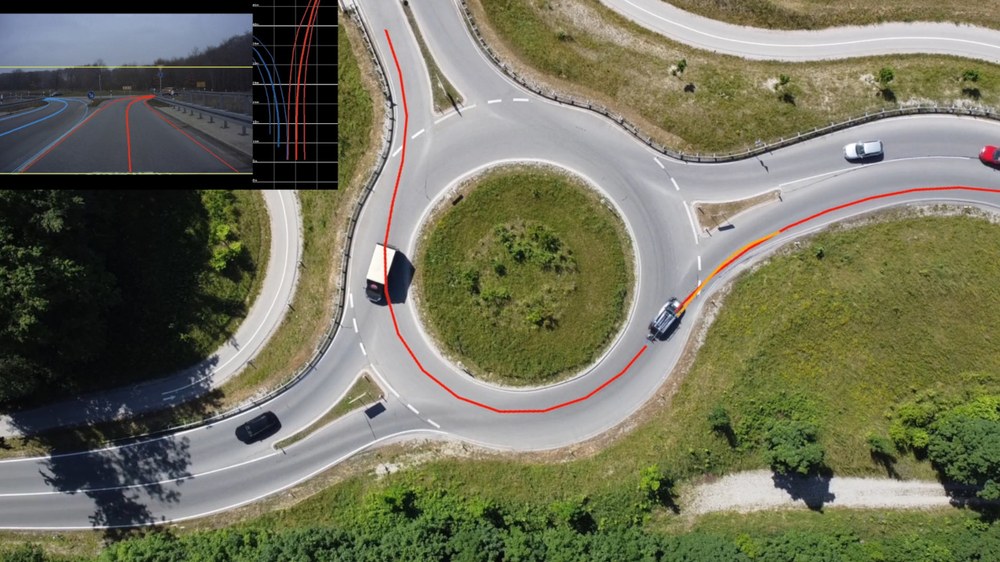
Kombination aus KI-basierter Fahrbahnerkennung und hochpräzisen GPS-Daten
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.