
HGF Alliance "ROBEX"


ROBEX
{kind=link}

ROBEX
{kind=link}
20170627_ROBEX_2_4.jpg
{kind=link}
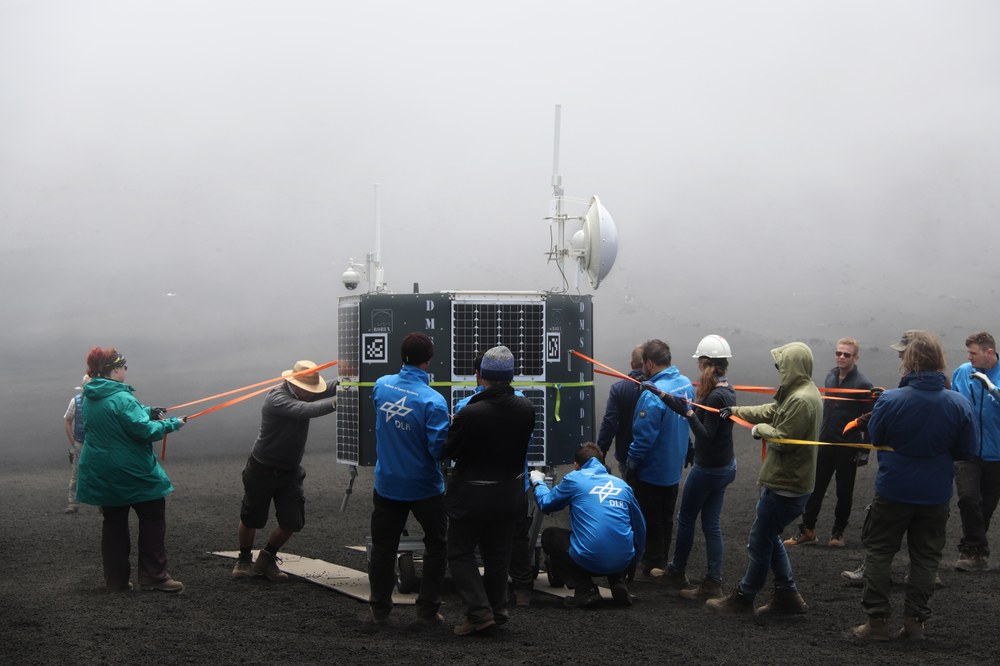
The HGF Alliance ROBEX (Robotic Exploration of Extreme Environments) is responsible for the conceptual design and technical development of robotic infrastructures on the Moon and in the deep sea. The main focus of the Alliance is the modular design and reconfigurability of the stations. The main research objectives include:
- The development of specific systems and instruments for the exploration of extreme and hard-to-reach locations on Earth (deep sea) and in space (on the Moon); the focus here is on mobile and modular infrastructure (central docking stations, intelligent and autonomous controls, the further development of energy supply and communications, and the continued development of sensors and autonomous robotics)
- The implementation of modular robotic infrastructure; this involves demonstrating how such infrastructure could be used on the Moon and in the deep sea. The interaction between individual components, mobility, manipulability and testing autonomy, all of which are demonstrated for a variety of scientific objectives.
- Field tests for existing and newly developed technologies in the deep sea and on land (with similar conditions to those on the Moon), feasibility and usage in the corresponding environments. The field tests are applied to suitable scientific tasks in the deep sea (e.g. methane hydrate, hydrothermal vents and slope stability) and on the Moon (the formation and composition of the Moon, the size of its core and mantle, the analysis of volatile components, and ice on the Moon’s surface and the south pole).
Contributions made by the department of Landing and Exploration Technologies include the construction of the landing system and its payload module, the central energy supply unit, and the autonomous measurement systems that were developed based on the experience acquired during the MASCOT mission.
Contact
Dr. Lars Witte
German Aerospace Center (DLR)
Institute of Space Systems