
AI-based Vertical Dynamics Control
Our tool chain for safe vehicle dynamics supports design, training, and validation of advanced and AI-based vehicle dynamics control algorithms and its seamless transfer into a real system.
Tool chain for safe vehicle dynamics

With a focus on meeting industrial demands, we innovate AI-based controller design methods to accelerate the development of chassis control functions for complex mechatronic systems. In this context, there is a high demand for efficient tool chains for reinforcement learning (RL)-based controllers to reduce costs in the development process with its high variant and derivative diversity.
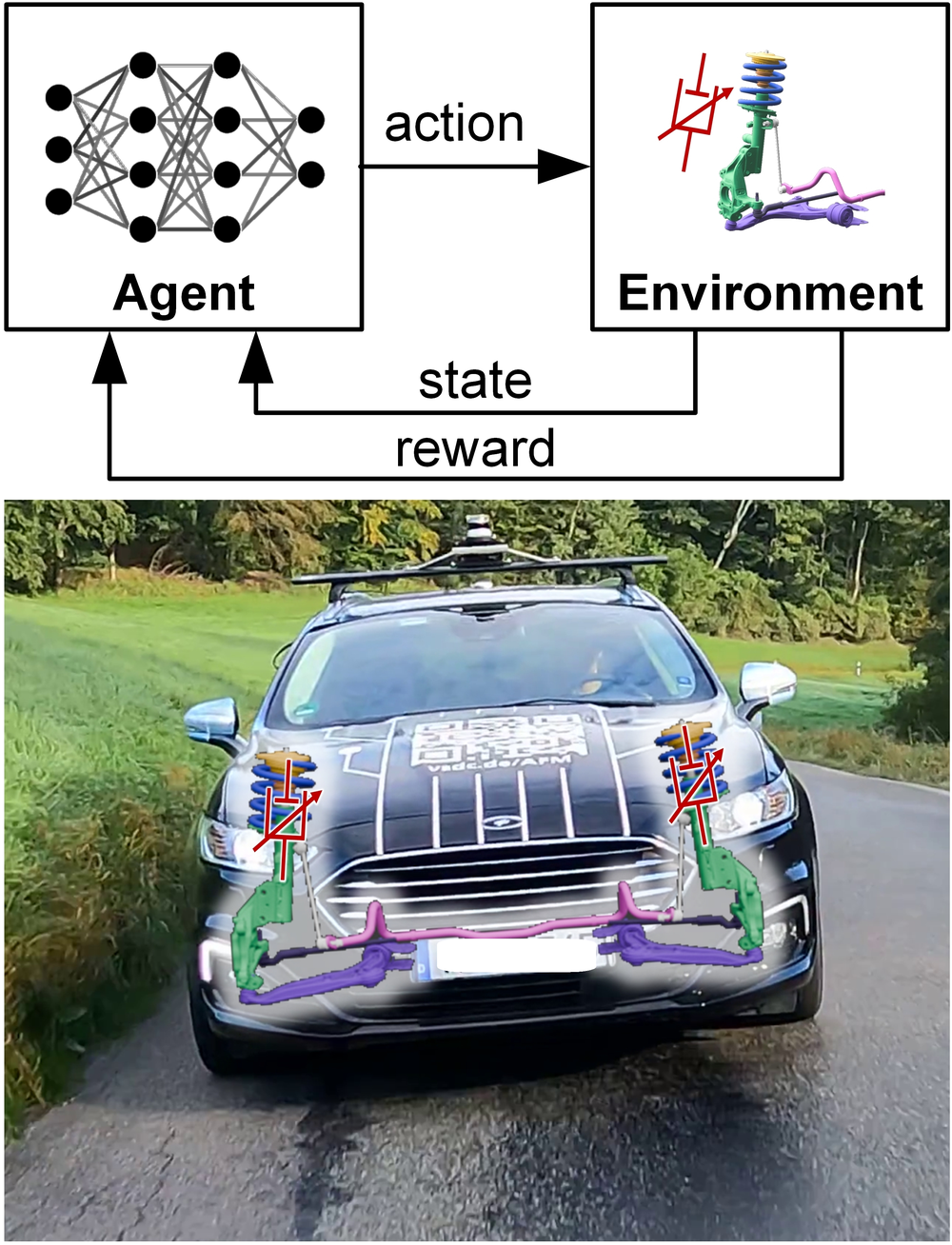
To meet these demands, we developed a modular and industry-standard capable tool chain for simulation-based training of RL vehicle dynamics controllers. This tool chain was successfully integrated for semi-active vertical dynamics control in the DLR "AI for Mobility" (AFM) research vehicle. In this context, we developed dynamical models of the AFM, which enabled us to synthesize a vertical dynamics controller agent by reinforcement learning. Consequently, the AI-based controller was integrated into a dynamical vehicle model for software-in-the-loop (SIL) tests. This validation step of functional software testing contributes to ensure safe operation of the controller. In both test bench and real driving validations, the AI-based controller demonstrated improved comfort and safety properties compared to a state-of-the-art benchmark controller.
The tool chain for AI-based controller synthesis has been successfully applied in industry transfer projects with OEMs and Tier 1 suppliers. This effort has supported small, medium, and large-scale industries in adopting AI for mechatronic products and utilizing model-based design with validation and verification through industry-standard tools like Modelica and the Functional Mock-up Interface (FMI). In addition, we work together with Automotive Tier 1 and software tool suppliers in the ITEA project OpenSCALING. We now focus on contributions to tool chains improvements and enhance modeling and interface standards like Modelica, FMI, and eFMI for physics-enhanced neural ordinary differential equations (hybrid modeling) with seamless integration in machine learning environments.