For the safe commissioning of highly and fully automated road vehicles, new model-based methods and toolchains for development, validation, and verification are required. The main focus is on securing and continuously monitoring the behavior of automated vehicles in both known and unknown traffic situations.
Highly automated vehicles
The project focuses on simulation- and scenario-based testing methods.
Methods, Processes, and Toolchains for the Validation & Verification of NGCMethods, Processes, and Toolchains for the Validation & Verification of NGC
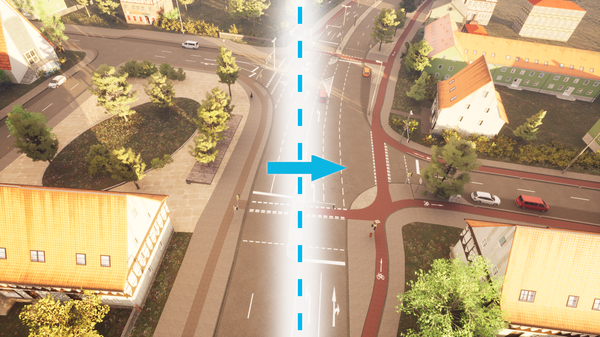
The project V&V4NGC (Validation & Verification for the Next Generation Car) is developing scenario-based, simulation-supported procedures that are intended to become a central part of future approval processes for automated driving functions. Continuous improvement is enabled by the use of real field data (e.g., from the Niedersachsen test field). The goal is a seamless lifecycle approach with virtual certification and digital twins, which also takes learning AI systems into account. These approaches are demonstrated and evaluated through a virtual urban drive in Braunschweig.
NGC Simulation Framework
The interaction of automated and autonomous systems with an open world makes it necessary develop completely new approaches for their verification and validation, since their behavior as well as their environment is not capable of being described formally in a complete way. Thus, to bring these societally beneficial systems to the market and into the field in a way that in which they follow our rules and values, it is necessary to explicitly address to prove its quality with methods for their verification and validation, as presented in the following.
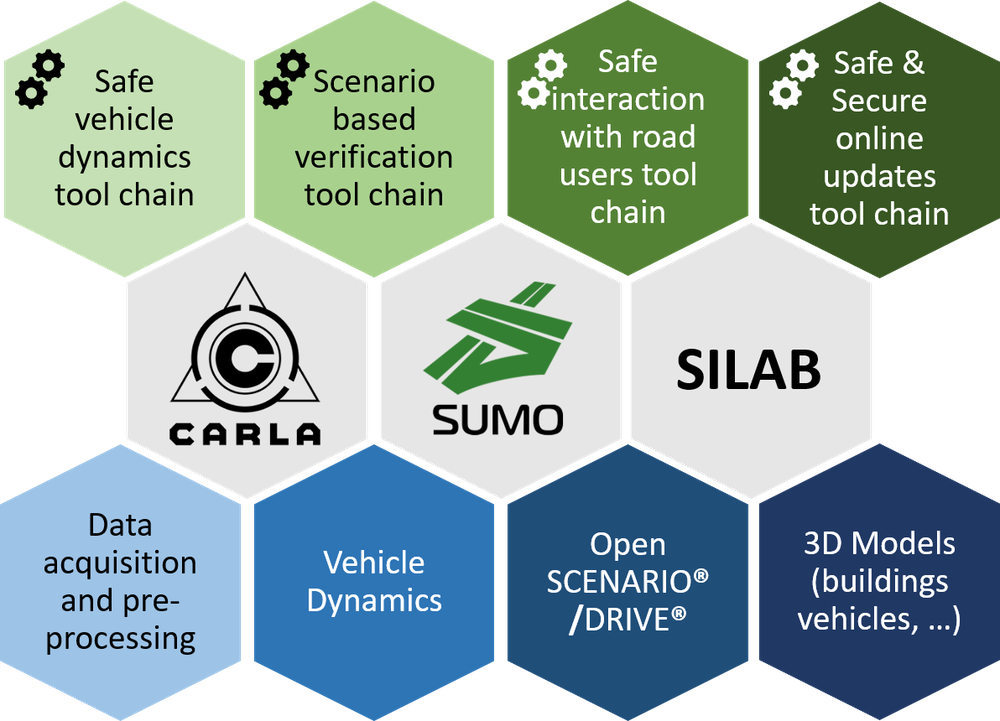
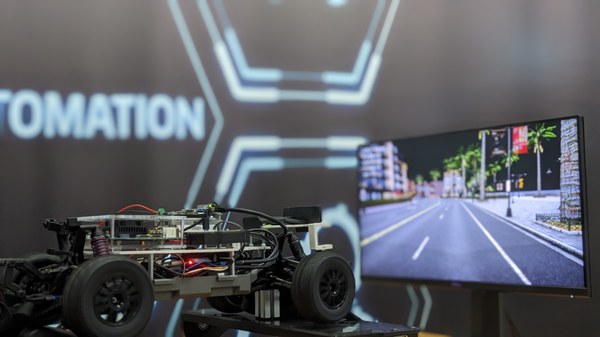
The NGC Simulation Framework offers a unique collection of simulation-based methods and tools for the development and testing of highly and/or fully automated (automotive) vehicle systems. The NGC Simulation Framework supports a mixed virtual/physical system integration, enabling key parts of the certification processes for future automation systems and their subsystems in tomorrow's road traffic through a scenario-based simulation environment.
NGC-Simulator
Example elements of the NGC Simulation Framework with custom toolchains on top.
The methods and tools within the NGC Simulation Framework comprise, for example, a macroscopic traffic simulation perspective to model complex traffic environments with a number of different traffic participants (and traffic streams). Below this macroscopic view, different simulation-based tools and methods exists, which can be used for detailed modeling of individual traffic participants as well as components of vehicle automation systems. These in turn are divided into tools and methods for the development of system requirements and vehicle architecture models, up to real-time capable Hardware-in-the-Loop models, which can be used for (virtual) integration tests of HW/SW components of vehicle automations.
Tools and Methods Developed in the V&V4NGC Research Project
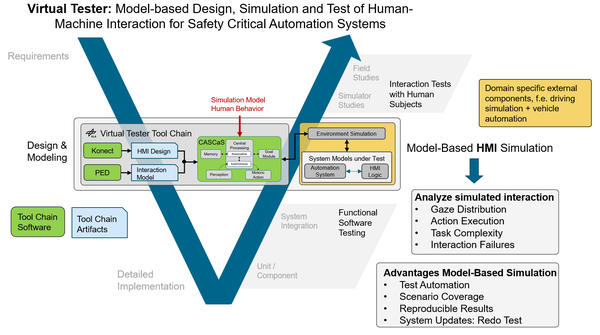
Besides the methods and tools for the development and testing of technical systems, another focus is put on methods and simulation-based tools targeting human-machine interaction. This includes real-time capable simulation with human participants in driving simulators, as well as model-based simulation of human-machine interaction using computer models of human behavior. With these different simulation-based methods and tools, a large number of heterogenous studies and tests have been successfully conducted. All of the following reported Verification and Validation (V&V) toolchains use components from the NGC Simulation Framework.