Für die sichere Inbetriebnahme hoch- und vollautomatisierter Straßenfahrzeuge werden neue modellbasierte Methoden und Werkzeugketten zur Entwicklung, Validierung und Verifikation benötigt. Dabei geht es insbesondere darum, das Verhalten automatisierter Fahrzeuge in bekannten und unbekannten Verkehrssituationen abzusichern und kontinuierlich zu überprüfen.
Hochautomatisierte Fahrzeuge
Das Projekt fokussiert sich auf Verfahren des simulationsgestützten szenariobasierten Testens.
Methoden, Prozesse und Werkzeugketten für die Validierung & Verifikation von NGC
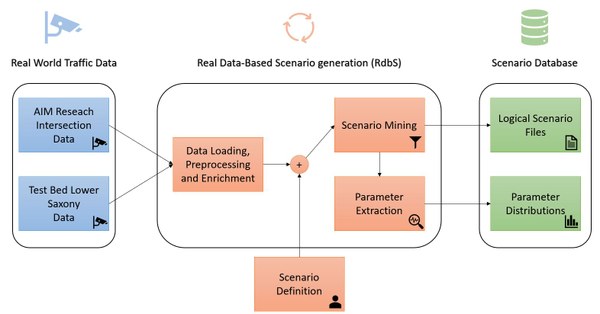
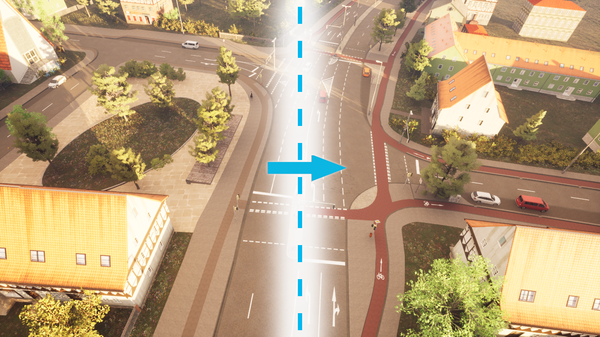
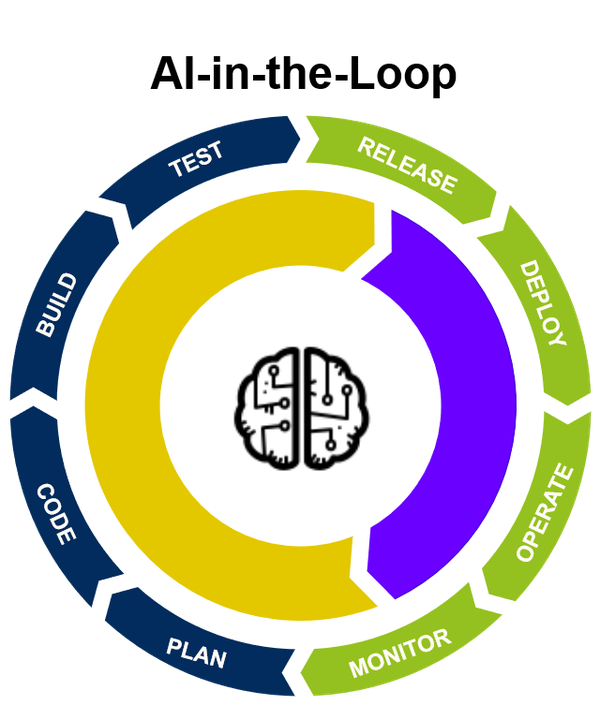
Das Projekt V&V4NGC (Validierung & Verifikation für das Next Generation Car) entwickelt hierfür szenariobasierte, simulationsgestützte Verfahren, die zukünftig ein zentraler Bestandteil von Zulassungsprozessen automatisierter Fahrfunktionen sein sollen. Eine kontinuierliche Verbesserung wird durch die Nutzung realer Felddaten (z. B. aus dem Testfeld Niedersachsen) ermöglicht. Ziel ist ein durchgängiger Lebenszyklusansatz mit virtueller Zertifizierung und digitalen Zwillingen, der auch lernende KI-Systeme berücksichtigt. Diese Ansätze werden anhand einer virtuellen Stadtfahrt in Braunschweig demonstriert und evaluiert.
NGC Simulations-Framework
Die Interaktion automatisierter und autonomer Systeme mit einer offenen Welt macht es notwendig, völlig neue Ansätze für deren Verifikation und Validierung zu entwickeln, da weder ihr Verhalten noch ihre Umgebung vollständig formal beschreibbar sind. Um diese gesellschaftlich nützlichen Systeme regel- und wertekonform auf den Markt und in den Einsatz zu bringen, ist es daher erforderlich, ihre Qualität explizit durch Methoden zur Verifikation und Vali-dierung nachzuweisen, wie im Folgenden dargestellt.
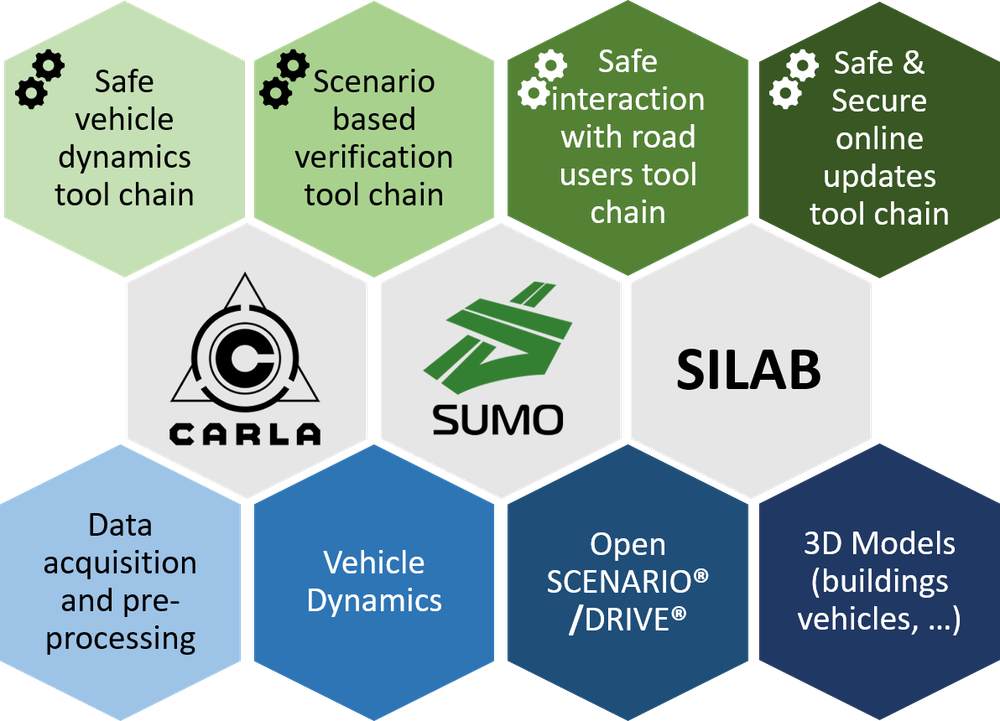
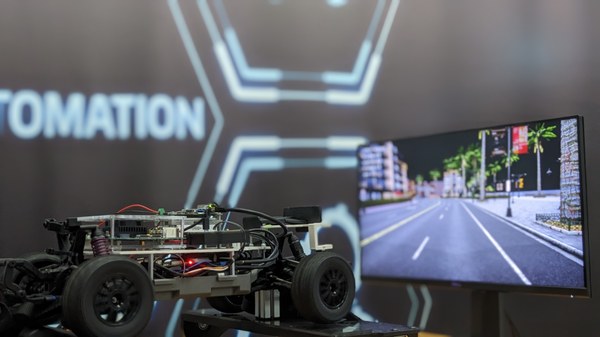
Das NGC Simulations-Framework bietet eine einzigartige Sammlung simulationsbasierter Methoden und Werkzeuge zur Entwicklung und Erprobung hoch- bzw. vollautomatisierter (automobiler) Fahrzeugsysteme. Das NGC Simulations-Framework unterstützt eine gemischte virtuelle/physische Systemintegration und ermöglicht damit zentrale Bestandteile zukünftiger Zertifizierungsprozesse für Automatisierungssysteme und deren Teilsysteme im Straßenverkehr von morgen durch eine szenarienbasierte Simulationsumgebung.
NGC-Simulator
Beispielhafte Elemente des NGC-Simulationsframeworks mit darauf aufbauenden kundenspezifischen Toolketten.
Die im NGC Simulations-Framework enthaltenen Methoden und Werkzeuge umfassen beispielsweise eine makroskopische Verkehrssimulations-perspektive zur Modellierung komplexer Verkehrsumgebungen mit einer Vielzahl verschiedener Verkehrsteilnehmer (und Verkehrsströme). Unterhalb dieser makroskopischen Sicht existieren verschiedene simulationsbasierte Werkzeuge und Methoden, die zur detaillierten Modellierung einzelner Verkehrsteilnehmer sowie von Komponenten automatisierter Fahrzeugsysteme eingesetzt werden können. Diese wiederum unterteilen sich in Werkzeuge und Methoden zur Entwicklung von Systemanforderungen und Fahrzeugarchitekturmodellen bis hin zu echtzeitfähigen Hardware-in-the-Loop-Modellen, die für (virtuelle) Integrationstests von Hard- und Software-komponenten automatisierter Fahrzeugsysteme verwendet werden können.
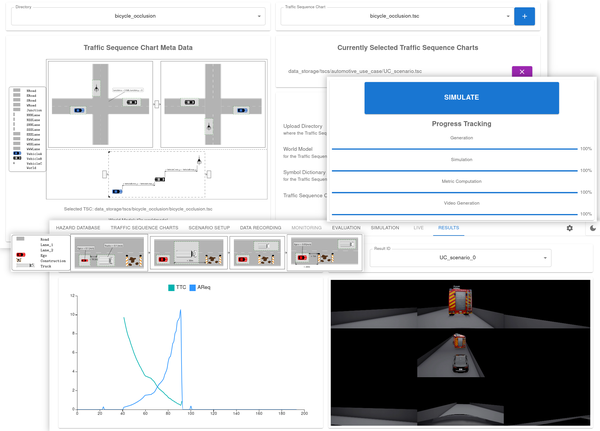
Werkzeuge und Methoden, die im Forschungsprojekt V&V4NGC entwickelt wurden
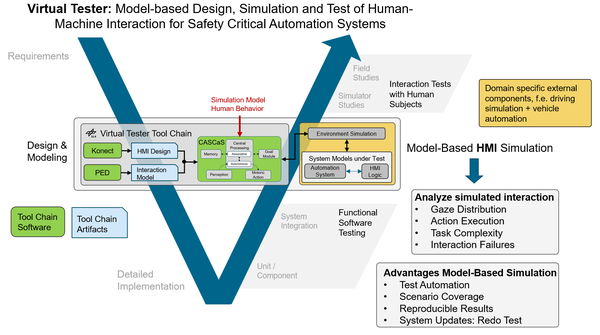
Neben den Methoden und Werkzeugen zur Entwicklung und Erprobung technischer Systeme liegt ein weiterer Fokus auf Methoden und simulationsbasierten Werkzeugen zur Mensch-Maschine-Interaktion. Dazu gehören sowohl echtzeitfähige Simulationen mit menschlichen Probanden in Fahrsimulatoren als auch modellbasierte Simulationen der Mensch-Maschine-Interaktion unter Verwendung rechnergestützter Modelle menschlichen Verhaltens. Mit diesen unterschiedlichen simulationsbasierten Methoden und Werkzeugen konnten bereits zahlreiche heterogene Studien und Tests erfolgreich durchgeführt werden. Alle im Folgenden dargestellten Verifikations- und Validierungstoolketten (V&V) verwenden Komponenten des NGC Simulations-Frameworks.