
Virtueller Tester
Der Virtual Tester ist eine modellbasierte Toolchain, die es ermöglicht, verschiedene Mensch-Maschine-Schnittstellen (HMI) bereits in frühen Entwicklungsphasen eines Automatisierungssystems zu evaluieren.
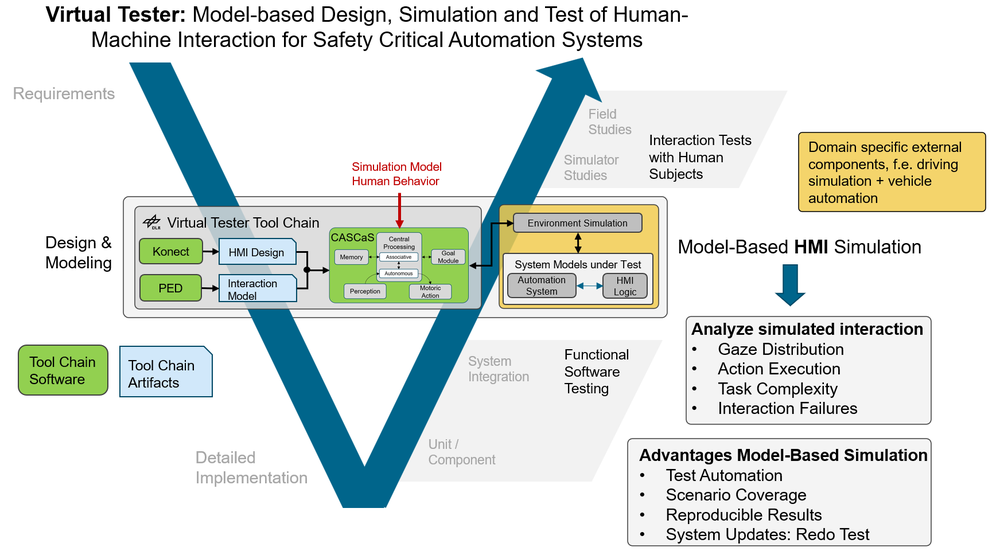

Modellbasierte HMI-Simulation für die effiziente Entwicklung automatisierter Systeme
Im Rahmen eines Entwicklungsprozesses ist die Toolchain zwischen dem rein funktionalen Softwaretest des Automatisierungssystems und späten Feldstudien mit realen Nutzern und physischen Systemen angesiedelt. Um beispielsweise geeignete Übergabezeiten zu untersuchen, können anhand der Simulationsergebnisse verschiedene Messgrößen bewertet werden, etwa Blickverteilung, Ausführungszeiten von Handlungen oder Aufgabenkomplexität.
Die Toolchain besteht aus drei verschiedenen Software-Werkzeugen und ermöglicht es HMI-Designern, Entwicklern von Automatisierungssystemen und Testingenieuren, die Interaktion zwischen dem Automatisierungssystem, der HMI und dem menschlichen Nutzer systematisch zu entwerfen, zu modellieren, zu simulieren und zu analysieren. Ausgangspunkt ist ein HMI-Design-Prototyp mit Konect und eine formale Beschreibung der Interaktionsaufgabe in PED. Das menschliche Interaktionsverhalten wird durch die kognitive Architektur CASCaS simuliert. Durch die Anbindung von CASCaS an eine domänenspezifische Simulationsumgebung (z. B. Automobil, Luftfahrt, Schifffahrt) ist die Integration in bestehende Simulations- und Testumgebungen von OEMs und Zulieferern möglich.
Die Vorteile einer modellbasierten Toolchain umfassen die Testautomatisierung und die Abdeckung einer großen Bandbreite an Szenarien. Dadurch können Tests effizienter durchgeführt werden, mit dem Ziel, die Markteinführungszeit solcher Systeme und ihrer Updates zu verkürzen und gleichzeitig die Qualität zu erhöhen.
Zum Weiterlesen
SafetyLoop Lab – Bewegtsimulator
Mehr zum SafetyLoop Lab, einer hochdynamischen Versuchsplattform mit Hexapod-Motionsimulator, Versuchsfahrzeug und modernster Mensch-Maschine-Interaktionsumgebung: Zum SafetyLoop Lab – Bewegtsimulator