Das Institut für Flugsystemtechnik entwickelt und erforscht Algorithmen und Systeme zur Missions- und Trajektorienplanung. Dies deckt alle Flugphasen von Start, über Reiseflug, Landung und Bodenoperationen ab. Die Anwendungen reichen dabei von Drohnen über konventionelle Hubschrauber bis zu klassischen Flugzeugen. Dies erfordert, dass die Problemstellung hinsichtlich Modellierungsansatz, Randbedingungen, Optimierungsziel und Datengrundlage am jeweiligen Anwendungsfall ausgerichtet wird. Während Trajektorienplanung die detaillierte zeitliche Planung der Bewegung des Luftfahrzeuges in allen sechs Freiheitsgraden regelt, geht es bei der Missionsplanung um die abstraktere Abwägung von Zielen sowie die Festlegung von Kostenfunktionen für die Trajektorienplanung.
Optimierungsziele und Randbedingungen
Übliche Optimierungsziele der Missions- und Trajektorienplanung aus Sicht des einzelnen Fluggeräts sind beispielsweise Flugzeit oder Kraftstoffverbrauch. Es können aber auch die Interaktion mit der Umgebung - beispielsweise für reduziertes Bodenrisiko und Lärmemissionen oder für effiziente Luftbilderstellung - optimiert werden. Hinsichtlich Randbedingungen ist das primäre Ziel, fliegbare und sichere Trajektorien zu erzeugen. Dementsprechend müssen einerseits die Flugdynamik und gegebenenfalls Störungen wie Fehlerfälle oder Wind und Turbulenz berücksichtigt werden. Zudem muss Kollisions- und Konfliktfreiheit gegenüber statischen Hindernissen in Bodennähe (Hochspannungsleitungen, Kräne etc.) oder dynamischen Hindernisse in Form von kooperativem und nicht kooperativem Luftverkehr sichergestellt werden. Daher werden insbesondere bei niedrigen Flughöhen Umgebungsaspekte wie kritische Infrastruktur, Bereiche mit hohem Bodenrisiko oder Flugverbotszonen in der Planung berücksichtigt. Beim Flug über große Distanzen spielen dagegen Kommunikationsreichweiten und Möglichkeiten für Zwischenlandungen eine wichtige Rolle.
Echtzeitplanung
Die echtzeitfähige Planung ermöglicht es, die Flugmissionen auf unvorhergesehene Ereignisse wie Wetteränderungen, Hindernisse oder geänderte Missionsziele anzupassen. Im Gegensatz zur statischen Vorausplanung erfolgt die Neuberechnung der Flugroute während des Flugs und auf bordseitigen Systemen, wobei aktuelle Daten von Sensoren oder Kommunikationssystemen genutzt werden. Diese dynamische Anpassung stellt sicher, dass das Fluggerät effizient, sicher und zielgerichtet agiert, selbst in hochdynamischen Situationen. Aufgrund der Komplexität der Planung als auch der begrenzten Rechenressourcen an Bord stellt die Echtzeitfähigkeit eine Herausforderung dar. Zu den Lösungsansätzen, die in der Forschung verfolgt werden, gehören der Einsatz Sampling-basierter Algorithmen, die Parallelisierung von Planungsschritten und die Vorberechnung von Datenstrukturen, welche eine laufzeiteffiziente Planung ermöglichen.
Luftfahrzeugkonfiguration und Flugdynamik
Die Planung für Starrflügler und Drehflügler unterscheidet sich grundlegend aufgrund der unterschiedlichen Flugdynamik. Starrflügler zeichnen sich durch hohe Energieeffizienz und Reichweite aus, benötigen jedoch eine Mindestfluggeschwindigkeit und ausreichenden Platz für Start und Landung. Eine Herausforderung in der Planung für Starrflügler liegt in der Berücksichtigung von Beschränkungen, wie minimalen Kurvenradien und maximalen Steigraten. Drehflügler hingegen bieten mehr Flexibilität, da sie auf der Stelle schweben und vertikal starten und landen können. Sie sind ideal für Einsätze auf begrenztem Raum oder bei komplexen Missionsanforderungen. Durch die Anpassung der Planungsstrategien an den Typ des Luftfahrzeugs wird die Leistungsfähigkeit der jeweiligen Plattform optimal genutzt.
Datengrundlage
Für die Planung wird neben a priori Wissen und semantischen Informationen aus digitalen Karten und Geländemodellen auch auf Informationen aus Onboard-Umfelderkennungssystemen mittels Sensoren (Kamera: VIS, IR, LiDAR, Radar) oder Kommunikationsquellen von externen Dienstleistern gesetzt. Im Kontext des unbemannten Fliegens und SORA (SpecificOperations Risk Assessment) können zum Beispiel für unbemannte Systeme Routen berechnet werden, welche Gebiete hoher Bevölkerungsdichte meiden. Im militärischen Kontext werden unter anderem an Algorithmen zum taktischen Tiefflug für Hubschrauber unter Ausnutzung der Geländekontur und der natürlichen Deckung geforscht.
Mission- und Trajektorienplanung für die Landung in Windparks
Für das Fliegen im Windpark gelten Regeln, wie das Einfliege, der Flug innerhalb des Parks sowie das Verlassen zu erfolgen hat. Diese Vorschriften sorgen für Sicherheit und Effizient und müssen bei der Missions- und Trajektorienplanung berücksichtigt werden.
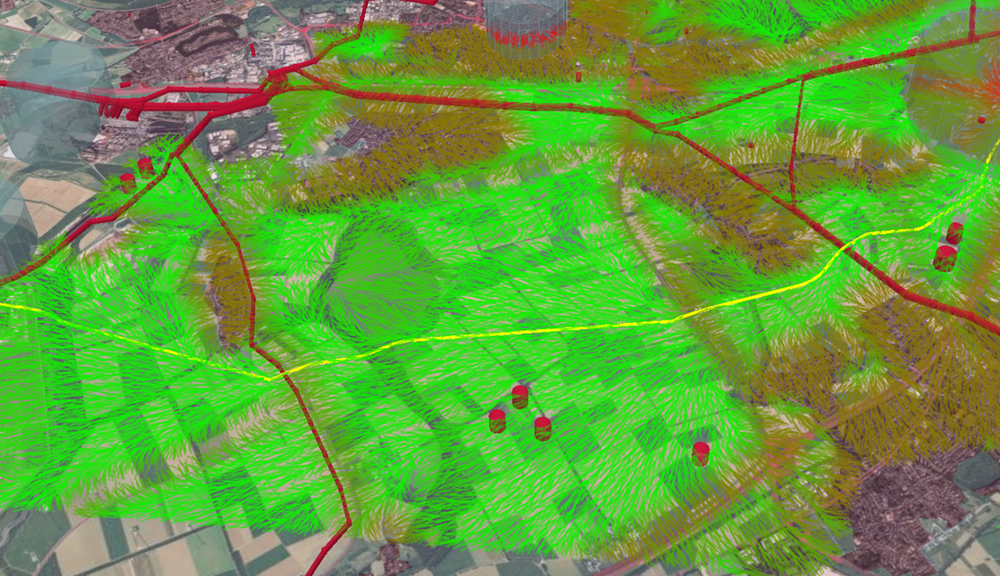
Visualisierung eines Suchgraphen bei der Trajektorienplanung
Die in grün dargestellten Bereichen zeigen die möglichen Pfade für die Trajektorienplanung. Rote Objekte markieren Hindernisse, die vermieden werden müssen, wie etwa Straßen oder kritische Infrastrukturen.



{kind=link}
{kind=link}
{kind=link}