
EPOS-Lid Datensatz
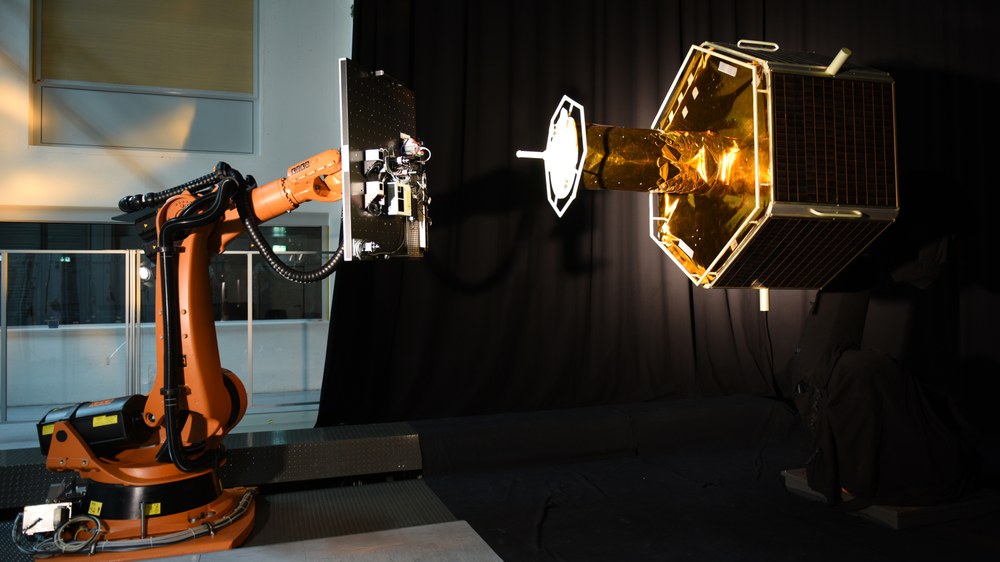

EPOS-Lid ist ein öffentlicher Benchmark-Datensatz für Lidar-basierte Posenschätzung in nicht-kooperativen Rendezvous-Szenarien. Er besteht zum einen aus sechs Lidar-Datensätzen, die im European Proximity Operations Simulator (EPOS) gesammelt wurden. Diese Datensätze können zum Testen und zur Validierung von Lidar-basierten Algorithmen zur Poseninitialisierung und -verfolgung verwendet werden. Zum anderen umfasst es synthetische Trainings- und Validierungsdatensätze, die mit einem Lidar-Simulator erzeugt wurden. Sie können für die Entwicklung von auf neuronalen Netzen basierenden Methoden zur Posenschätzung verwendet werden.
Datensatz (Download hier) enthält:
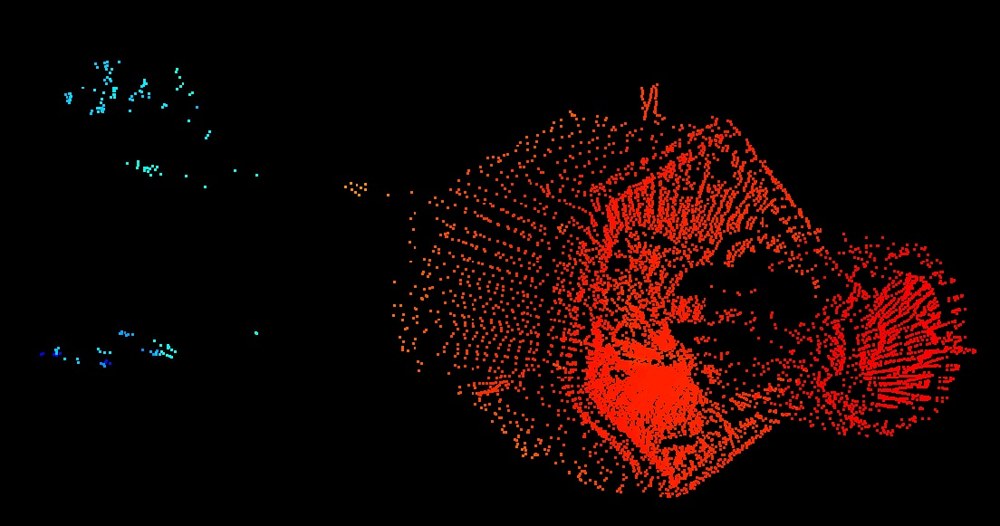
- 6 Lidar-Datensätze mit Bodenwahrheit, aufgenommen bei EPOS mit einem Livox Mid-40 Lidar. Die Trajektorien umfassen verschiedene Posen und reichen von 20m bis 3m Entfernung zum Zielsatelliten.
- Synthetische Trainings- und Validierungsdatensätze mit Bodenwahrheitsposen, die für zufällige Posen erzeugt wurden
- Ein Punktwolkenmodell des Zielsatelliten
- Eine README.txt, die den Inhalt und das Format der einzelnen Dateien beschreibt.
Verwenden des Datensatzes: Wenn Sie diesen Datensatz für Ihre Forschung nützlich finden, zitieren Sie bitte: “ Léo Renaut, Ksenia Klionovska, Maximilian Albracht, Heike Frei, EPOS-Lid: Lidar benchmark dataset for pose estimation during non-cooperative rendezvous,Acta Astronautica, Volume 238, Part A, 2026, Pages 414-423, ISSN 0094-5765, https://doi.org/10.1016/j.actaastro.2025.09.030."
Lizenz: Der EPOS-Lid Datensatz ist unter der „Community Data License Agreement – Sharing, Version 1.0“ veröffentlicht: Community Data License Agreement – Sharing, Version 1.0 - CDLA
Bei Fragen wenden Sie sich bitte an die Fachgruppe On Orbit Servicing und Autonomie.