
EPOS-Lid Dataset
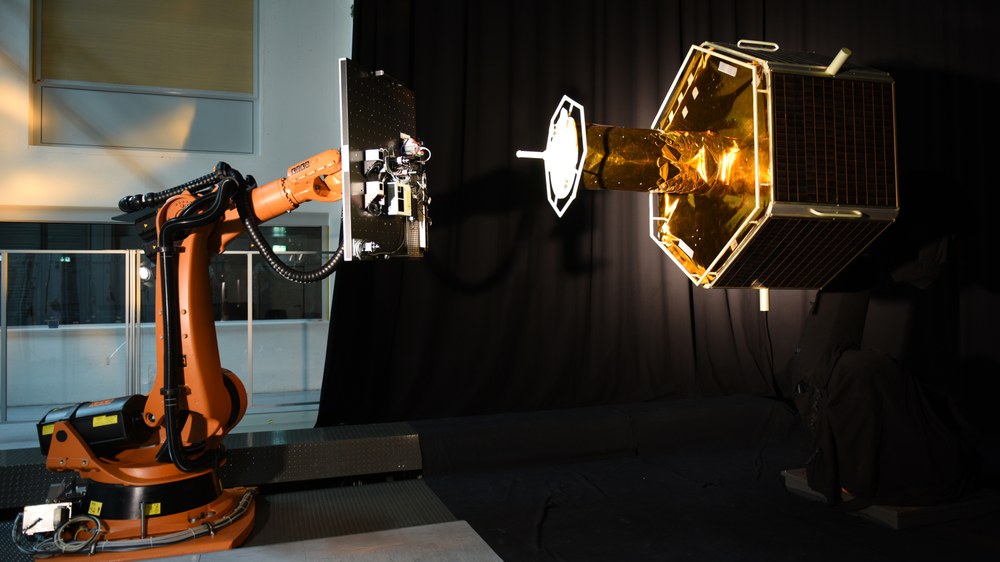

EPOS-Lid is an openly available benchmark dataset for lidar-based pose estimation in non-cooperative rendezvous scenarios. On the one hand, it consists of six lidar datasets collected at the European Proximity Operations Simulator (EPOS). These datasets can be used for testing and validation of lidar-based pose initialization and tracking algorithms. On the other hand, it comprises synthetic training and validation datasets generated with a lidar simulator. They can be used for the development of neural network-based pose estimation methods.
Dataset (Download here) contains:
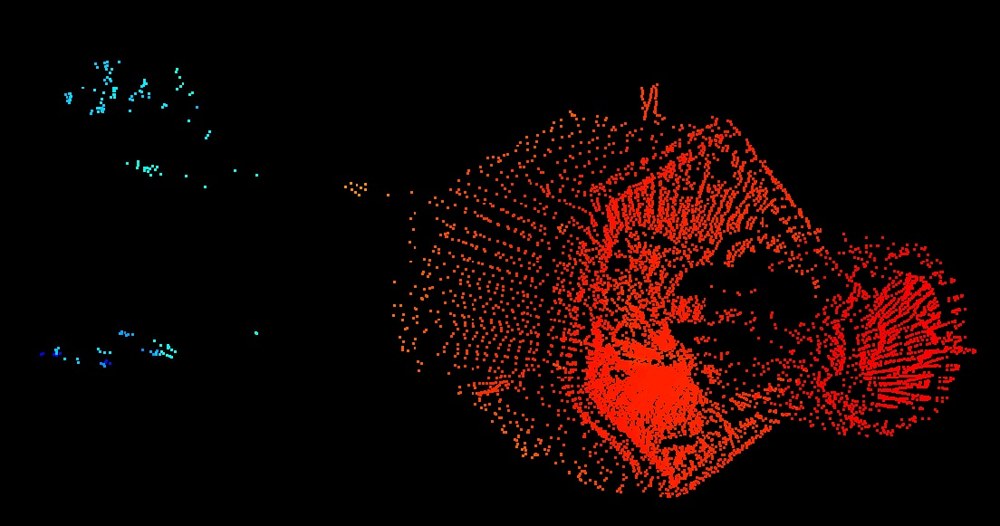
- 6 lidar datasets, with ground truth, recorded at EPOS, using a Livox Mid-40 lidar. The trajectories cover various poses, and ranges from 20m to 3m distance to the target satellite.
- Synthetic training and validation datasets, with ground truth poses, generated for randomized poses
- A point cloud model of the target satellite
- A README.txt detailing the content and format of each file.
Using the dataset: If you find this dataset useful in your research, please cite: "Léo Renaut, Ksenia Klionovska, Maximilian Albracht, Heike Frei, EPOS-Lid: Lidar benchmark dataset for pose estimation during non-cooperative rendezvous,Acta Astronautica, Volume 238, Part A, 2026, Pages 414-423, ISSN 0094-5765, https://doi.org/10.1016/j.actaastro.2025.09.030."
License: The EPOS-Lid dataset ist published under the „Community Data License Agreement – Sharing, Version 1.0“: Community Data License Agreement – Sharing, Version 1.0 - CDLA
For queries about the dataset, please contact the On Orbit Servicing and Autonomy group of DLR.