The flutter problem with swept-back flying wings - investigations on two extravagant aircraft designs from today and 80 years ago
October 14, 2025
The flutter problem with swept-back flying wings - investigations on two extravagant aircraft designs from today and 80 years ago
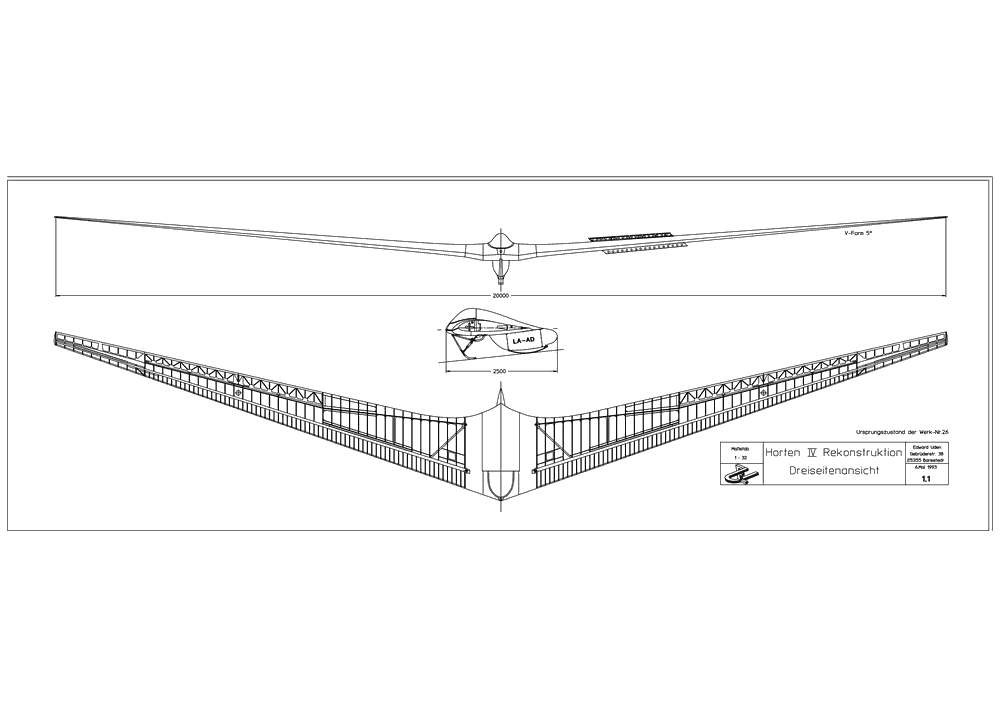
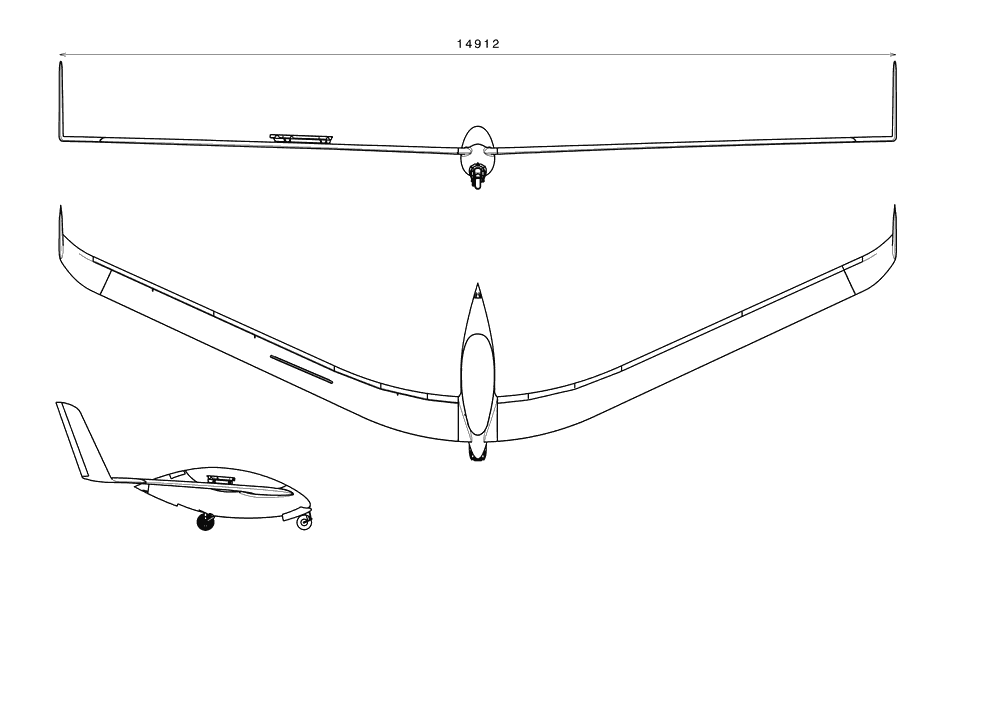
In autumn 2024 and May 2025, the Institute of Aeroelasticity had the opportunities to conduct a ground vibration test on two flying wing gliders. As similar as the aircraft are in terms of their rather unusual concept, they are very different in detail. The Horten IV is a replica of a construction from 1943 (the original is exhibited in Deutsches Museum München). It consists of wooden wings and a fuselage made of welded steel tubes. The completion of the replica is being supervised by the Akademische Fliegergruppe Darmstadt. In the second case, the AK-X of the Akademische Fliegergruppe Karlsruhe was tested, a very modern design with an elongated wing planform made entirely of highly rigid carbon fibre materials.
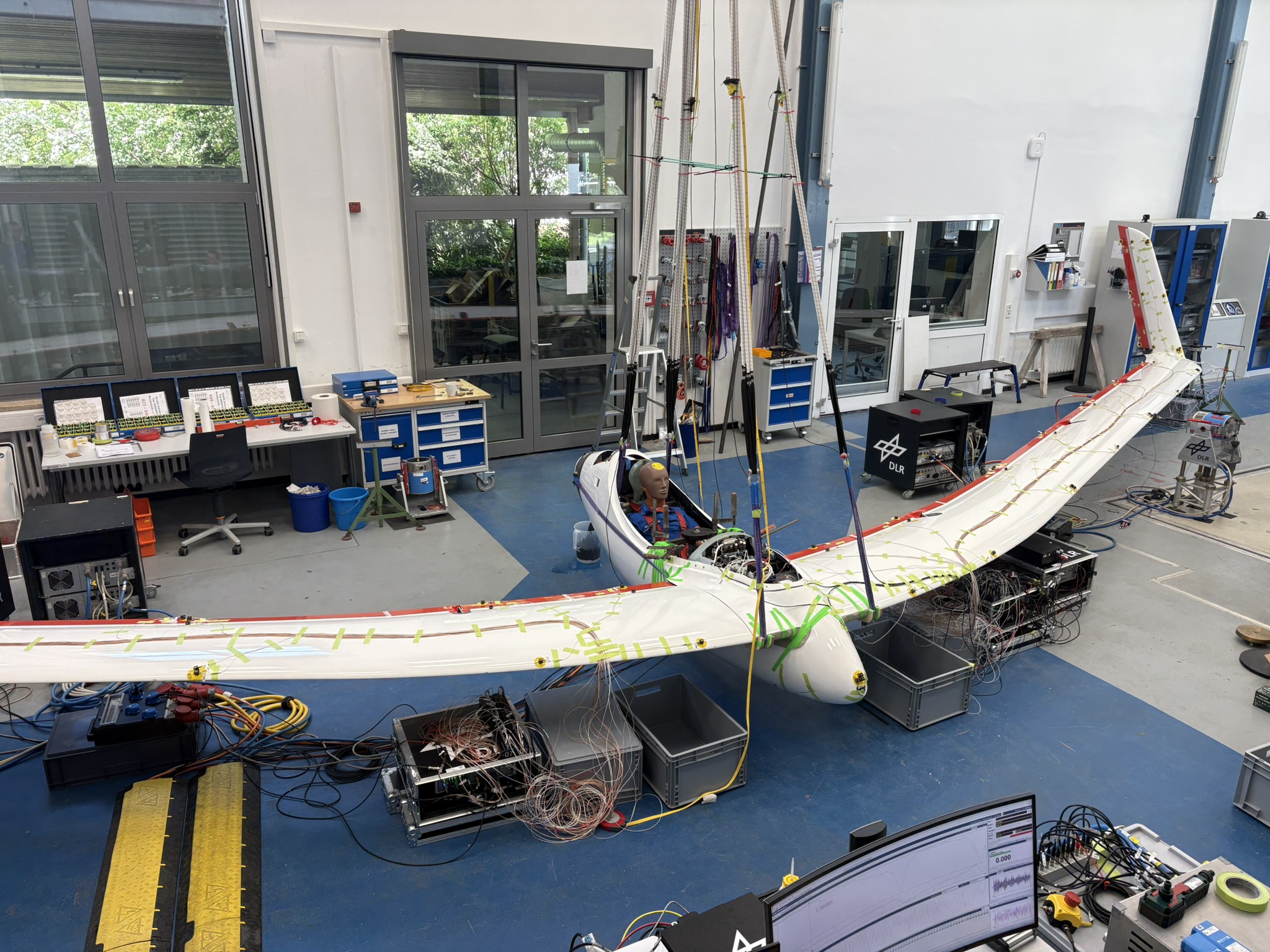
Flying wing glider Horten IV
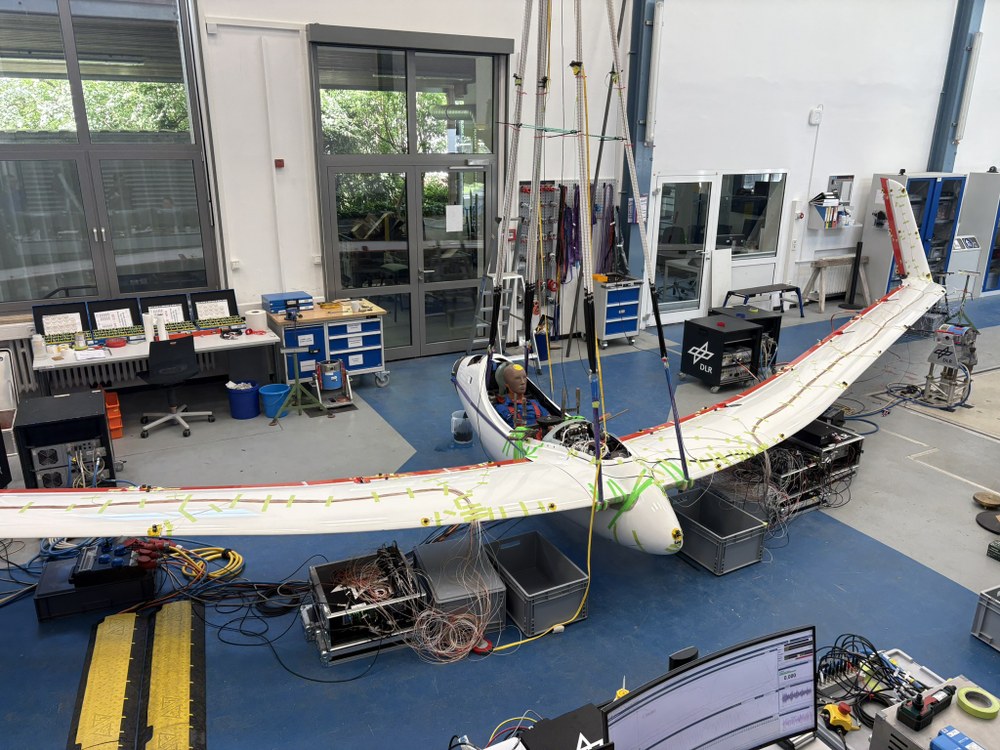
Replica of the Horten IV undergoing a ground vibration test at the DLR Institute of Aeroelasticity in Göttingen
Since the early days of aircraft development, it has been known that one key to increasing performance lies in reducing drag. Total drag is made up of three main components: induced drag, profile drag and frictional drag. In the course of development, the striving for lower aerodynamic drag led to the idea of the flying wing, which enables the complete elimination of the drag of the fuselage and tail unit at a lower weight, offering potential savings of up to 10% in overall drag. At the same time, however, numerous stability and control problems must be overcome due to the lack of aeromechanical stabilisation of the tail unit. The sweepback of the wing can compensate for some of these problems.
The rigid body flutter of the flying wing
Flutter in flight occurs due to the coupling of two actually damped natural airframe modes of vibration, whose frequencies approach each other with increasing airspeed. This superposition creates motion-induced air forces that can lead the oscillating motion in such a way that flutter is fuelled.
In a swept flying wing, the first symmetrical wing bending oscillation overlaps with the flight-mechanical pitching oscillation. In the pure bending oscillation, the outer wings, which lie behind the transverse axis, move up and down, while the inner wing must oscillate against it in front of the transverse axis. This looks as follows:
The inertial forces now generate a rotational movement around the transverse axis and thus a change in the angle of attack. Due to the vibration-induced air forces, the frequency of the pitching oscillation increases with flight speed because the resulting additional lift acts behind the centre of gravity. This is all the more the case with a flying wing because the rotational inertia around the transverse axis is comparatively low due to the lack of a tail unit. As the frequency of the first wing bending remains approximately constant above the speed, the two frequencies approach each other with increasing airspeed in such a way that a coupling of both vibration modes becomes possible. It is therefore only a question of the airspeed before flutter occurs. There are various ways of maximising the critical flutter speed for the design:
Increasing the frequency from the first wing bend by using a very rigid wing.
Reduction of the bending-twisting deformation behaviour by optimising the fibre composite construction, which is known as aeroelastic tailoring.
Reducing the increase in frequency of the flight-mechanical pitching oscillation by achieving the highest possible mass inertia around the transverse axis or by shifting the centre of gravity back.
Increasing the flight mechanical pitch damping by increasing the sweepback of the wing.
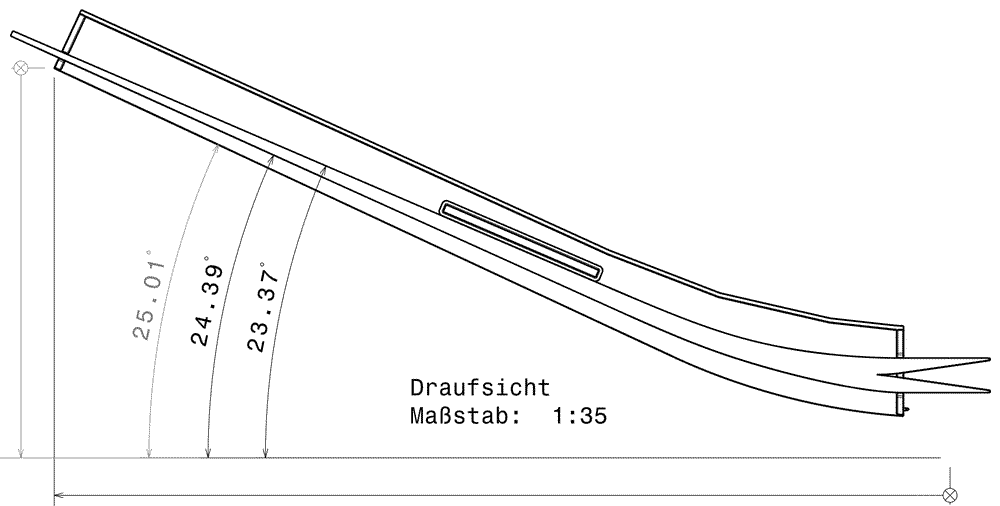
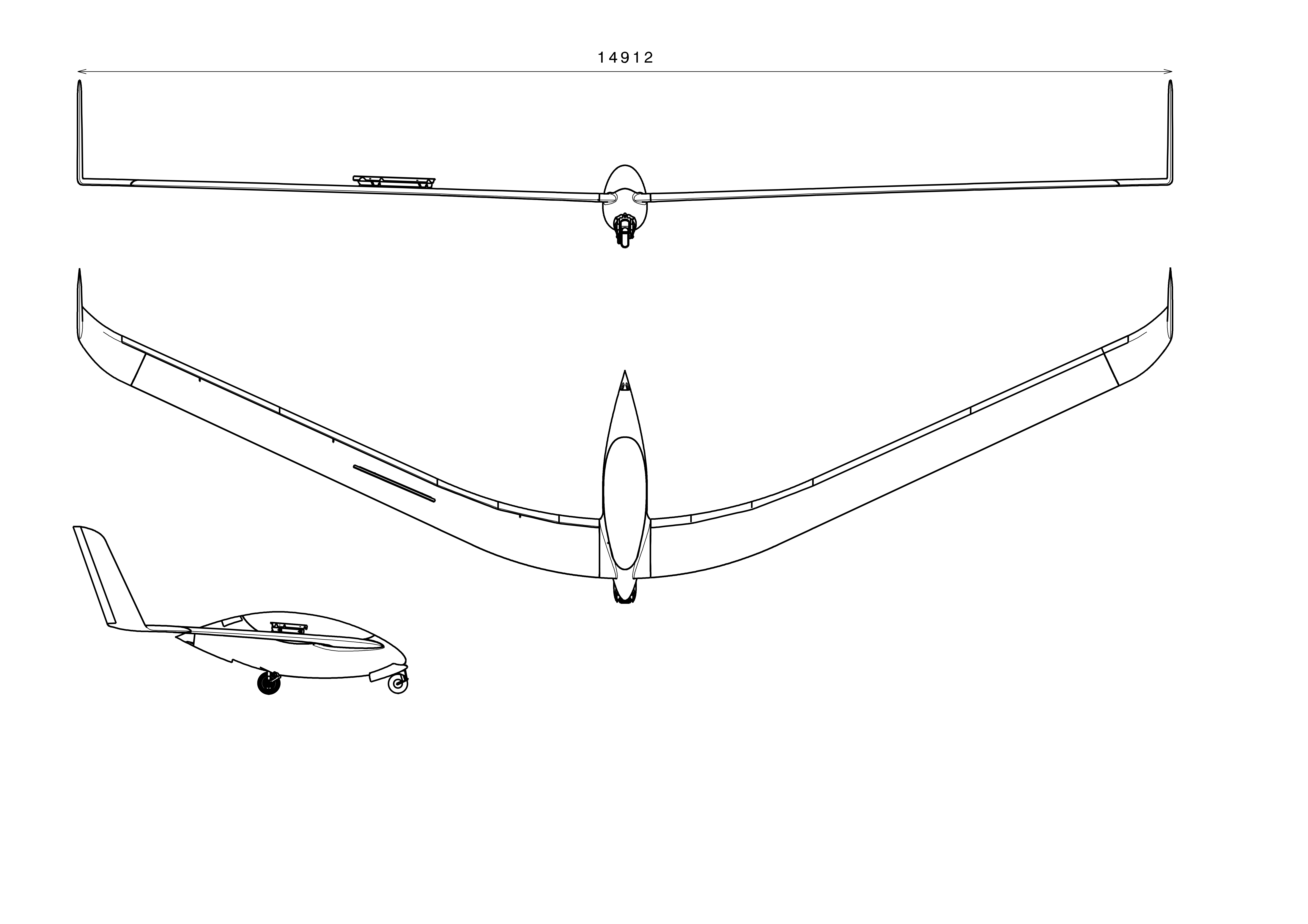
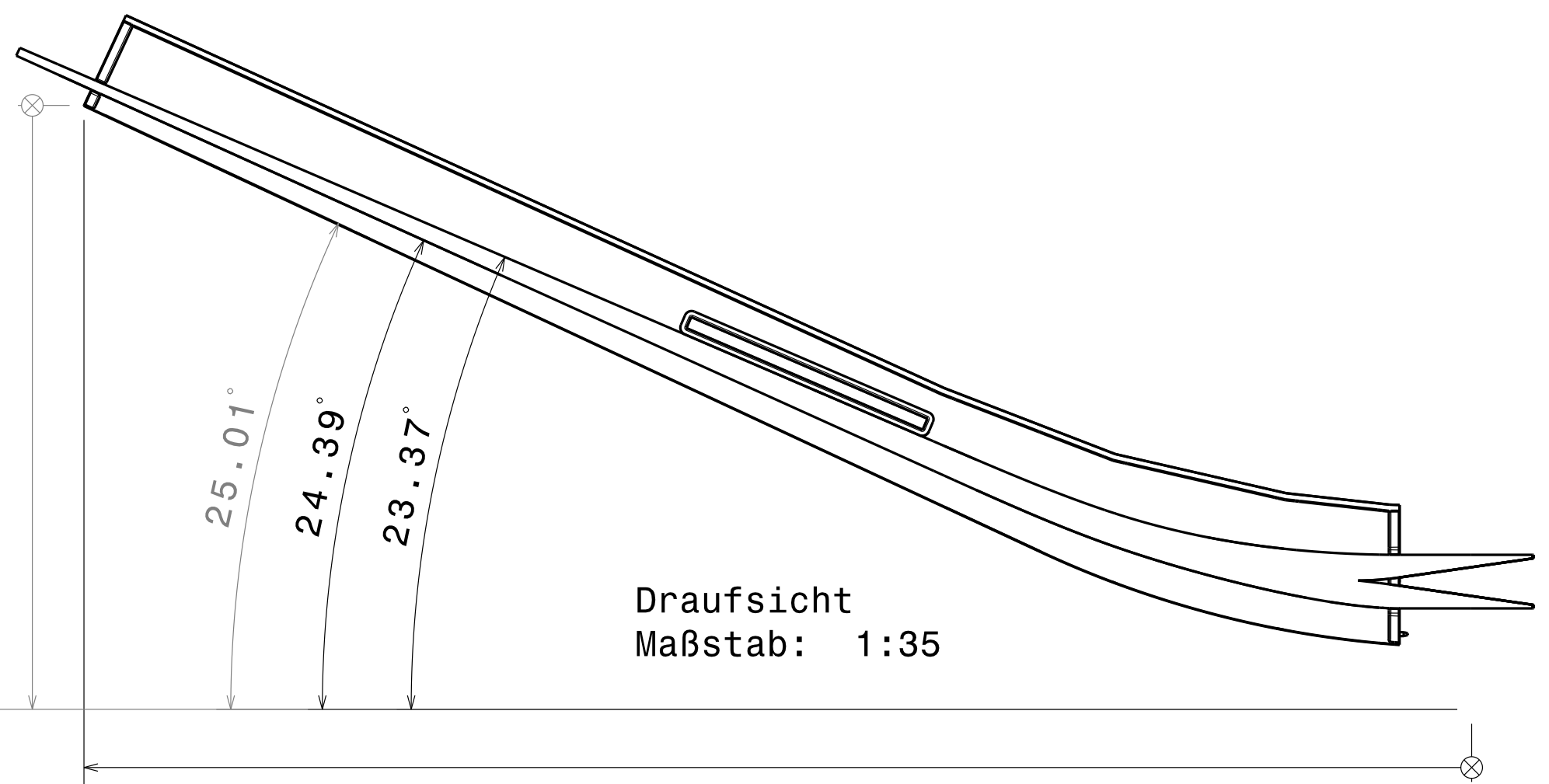
All these measures were taken into account in the design of the AK-X. The wing was designed to be particularly rigid so that the natural frequency of the first symmetrical wing bending oscillation is not below a limit of 4.0 Hz. Comparable conventional gliders with a wingspan of 15 metres only have a natural frequency of approx. 2.5 Hz, which shows that the structural AK-X wing design was driven by aeroelastic and not by strength requirements. In addition, the sweep of the load-bearing main spar relative to the wing planform was reduced as much as possible, as can be seen in the sketch below:
AK-X wing planform with aeroelastically tuned main spar with reduced sweep
Since all structural measures have a major influence on the flight mechanics, the design of a flying wing requires a multidisciplinary approach in order to fulfil flight mechanical, aerodynamic and aeroelastic requirements. For example, with aeroelastically advantageous rear centre of gravity positions, the stall behaviour becomes significantly more critical in slow flight.
Before flight testing, the so-called flutter test is required on the completed prototype to demonstrate that the vibration behaviour optimised in the design process actually occurs in reality. In the ground vibration test, the natural vibration modes with their natural frequencies are measured in such a quality that they can be used for comparison with the existing simulation models. On the other hand, the instrumentation with accelerometers is designed in such a way that the air forces induced by the movement can be calculated as a function of the airspeed using suitable aerodynamic methods on the basis of the measured vibration modes.
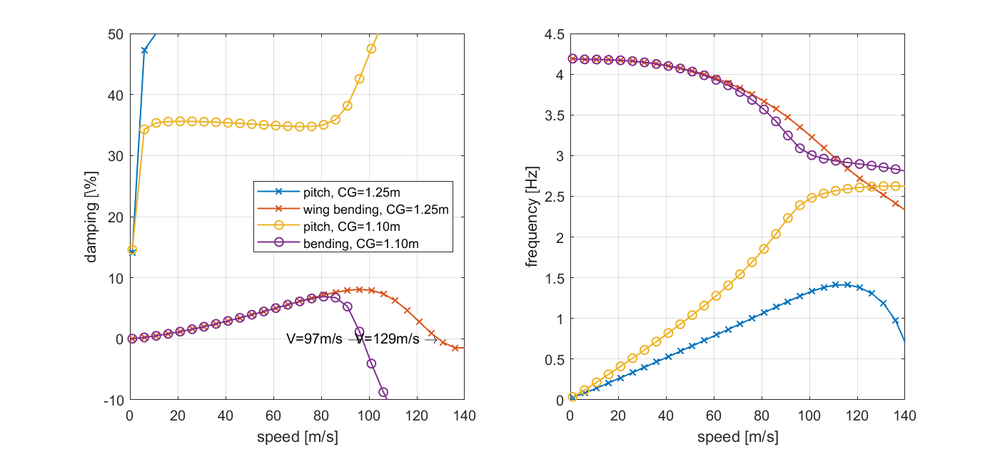
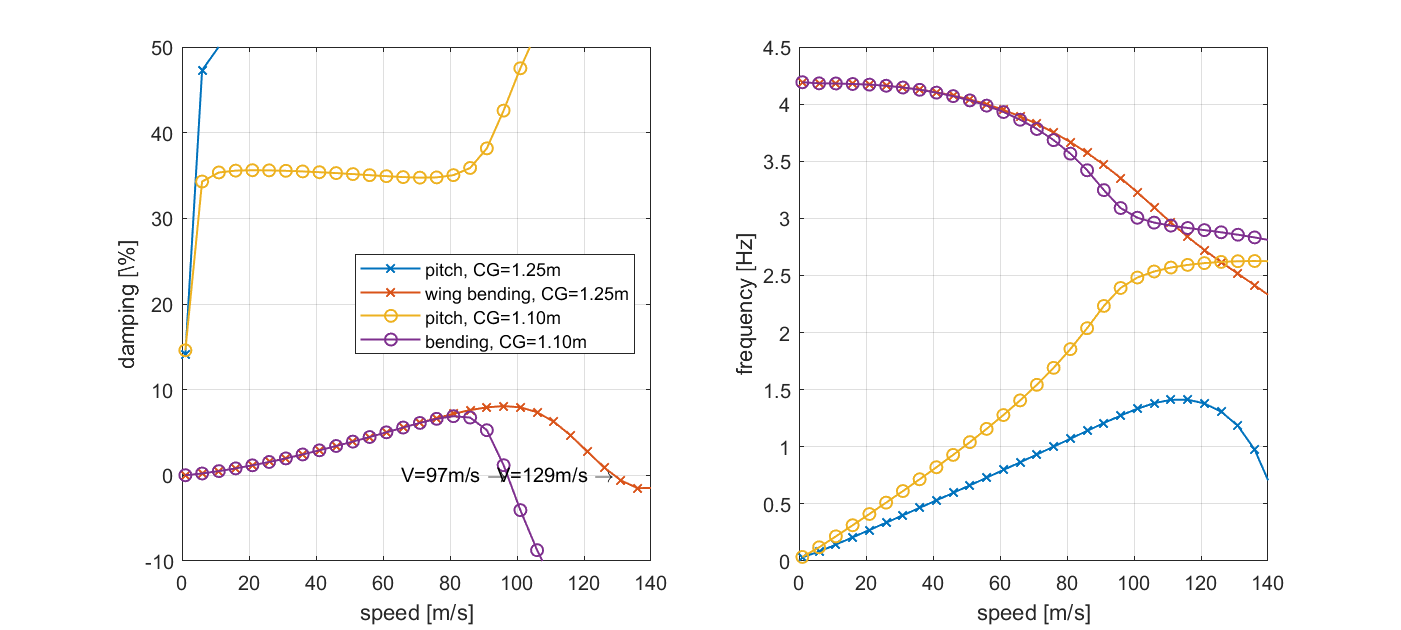
In the experiment, a bending frequency of 4.1 Hz was determined, so that there is a sufficient frequency distance to the pitching oscillation. In the next step, the flutter analysis can then be carried out on the basis of experimental modal data set, which provides a reliable statement about the critical flutter speed for precisely this coupling of pitching and bending vibration. Of course, other potential flutter instabilities are also identified. As already mentioned, there is a clear dependence of the critical flutter speed on the overall centre of gravity of the aircraft, which can shift between 15cm depending on the payload, as can be seen in the following damping and frequency curves over the airspeed.
AK-X: Damping- and frequency curves over flight speed
In contrast to the AK-X, the designers of the Horten IV had not yet focussed on the flutter problem of the flying wing at the time, although they worked very close to the flutter experts of the Aerodynamic Research Institute AVA in Göttingen (now DLR). As a result, there are some old pilot reports that attest to the Horten IV's tendency to flutter. For the replica, it must therefore be ensured that a new flight test of the already proven design does not show any aeroelastic surprises. For this reason, as with the AK-X, a ground vibration test was carried out at the Institute of Aeroelasticity.
In case that all compliance results are positive, we are sure that both extraordinary flying wings will survive their maiden flight without any problems. It is expected that we will then be able to admire more than 80 years of flying wing history in the sky in the near future.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}