
Drive-Nav
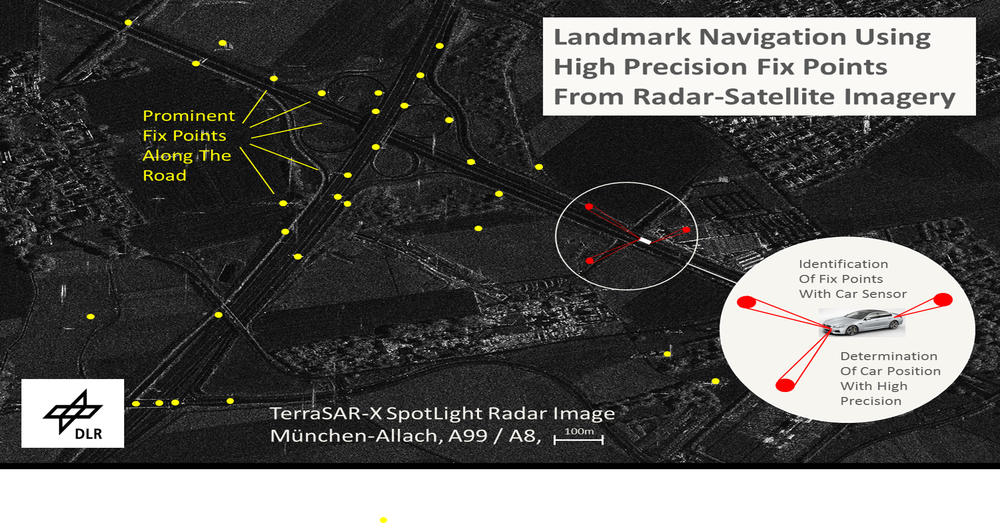
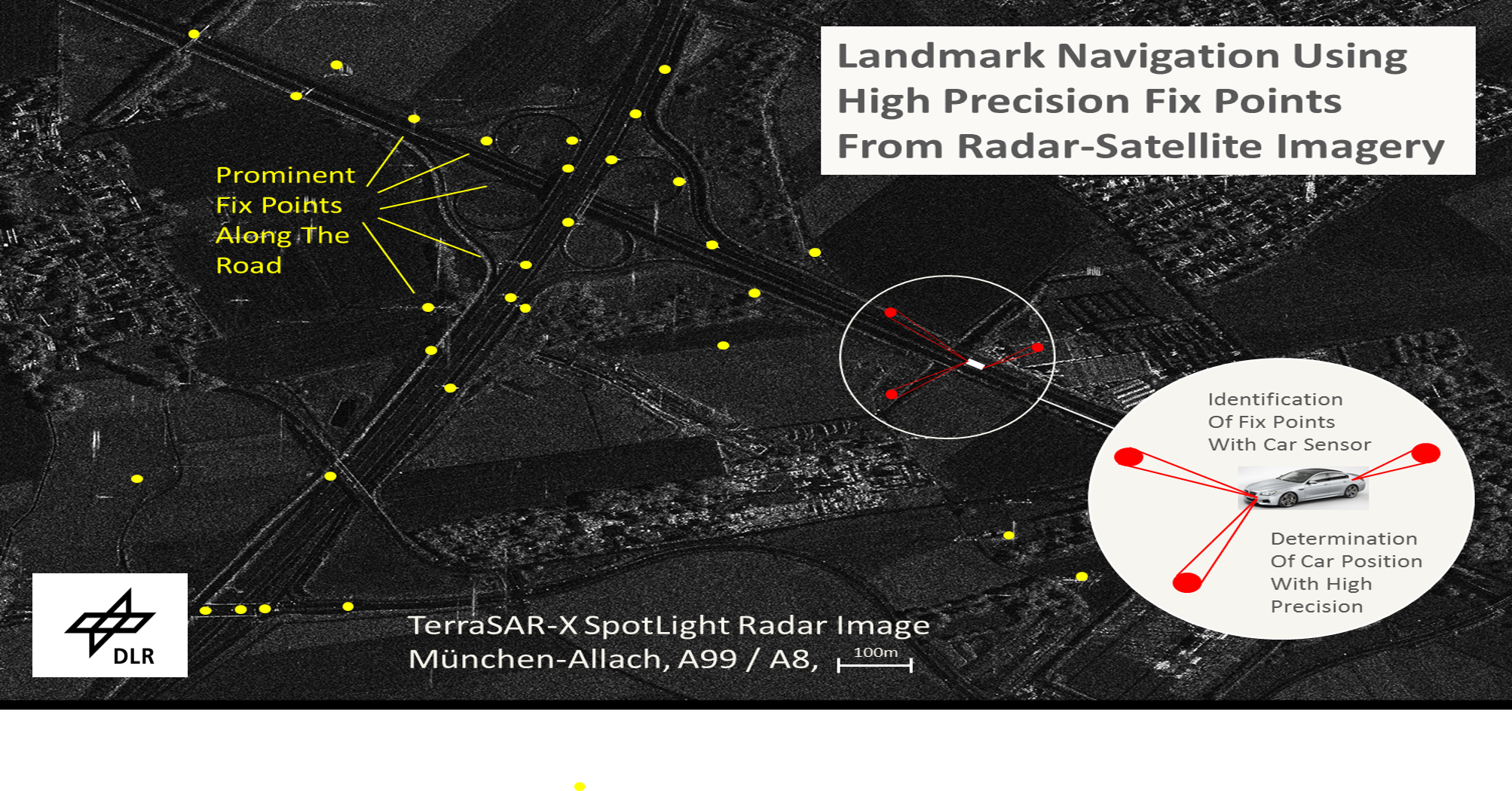
Project Drive-Nav includes a proof-of-concept for an independent high-precision back-up to satellite navigation (GPS, Galileo) by means of highly accurate landmark maps and car sensor data. For this purpose, the Remote Sensing Technology Institute is cooperating with industrial partners to determine the feasibility of the approach.
The method is based on the large-scale generation of landmark maps from remote sensing data (SAR, optics) which are used for self-localization in cars. During driving, the current position is precisely estimated by comparing the recognized elements of the landmark map with the signals measured by the radar sensors installed in the car. In a test in the north of Munich, the landmark map will also be transmitted to the vehicle via 5G broadcast using a terrestrial transmitter in order to prepare a path for updating the map information.

{kind=link}