CoMove – Recording and modelling the cooperative behaviour of car drivers
CoMove – Recording and modelling the cooperative behaviour of car drivers
The CoMove project is investigating the cooperative behaviour of drivers in complex traffic situations in order to develop methods that enable autonomous vehicles to communicate and cooperate effectively with human road users.
In road traffic, we rarely move in isolation, but interact with other road users, for example at zebra crossings, junctions or motorway slip roads. In most cases, traffic rules tell us how to behave. However, there are also traffic situations that are not clearly regulated. Here, communication and co-operation in particular contribute to the success of the situation. Accordingly, autonomous vehicles must also be able to communicate and co-operate with us if they are to become part of our traffic system.
In order to support the development of cooperatively interacting autonomous vehicles, we are investigating the cooperative behaviour of drivers in complex traffic situations together with the University of Ulm as part of the CoMove project. The work of the DLR Institute of Transportation Systems focuses in particular on the development of suitable methods for describing and evaluating this cooperative behaviour and the associated dynamic interaction processes of the participants.
With the help of empirical studies, which include focussed interviews and online studies as well as traffic observations and studies in (networked) driving simulators, the decision-making and communication processes of cooperating drivers are examined in particular. The quality of these studies is largely determined by the methods available for recording cooperative behaviour, i.e. how reliably and validly the concept of cooperation can be quantified.
Accordingly, the objectives of the project are to develop suitable methods and to understand and describe the dynamic interaction processes in detail, thus creating an empirically valid basis for the development of action planning strategies for cooperatively interacting automobiles. These strategies are characterised by the fact that they are transparent, comprehensible and predictable for surrounding road users because they reflect the behaviour and interaction strategies of human drivers.
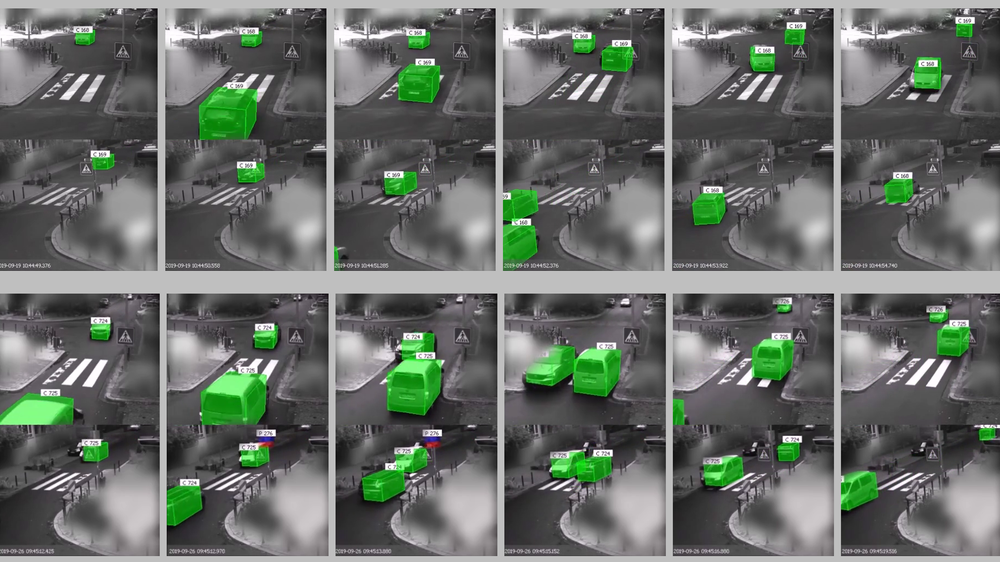
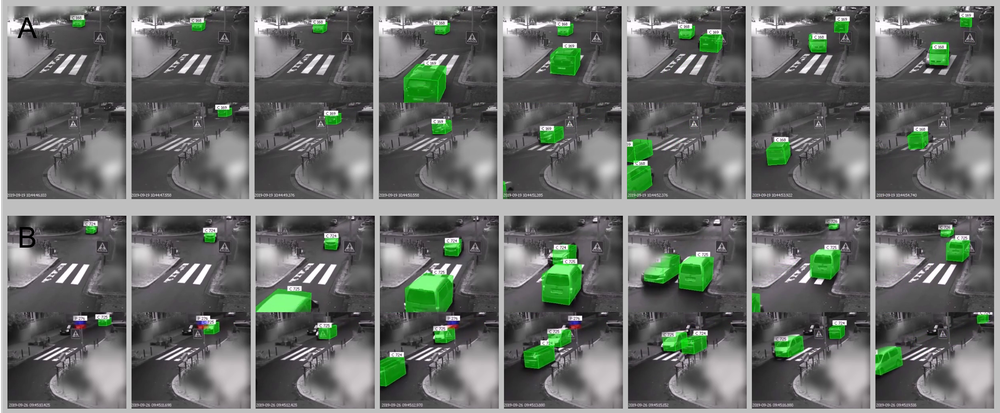
Drivers have to coordinate their actions at lane narrowings; they can act cooperatively (A) or competitively (B).


{kind=link}