GEMSTAR – GEoMetry based Sensor simulation Toolchain for Automotive and Rail research
Scenario-based verification and validation for automated driving
Thanks to modern scenario-based verification and validation tools, the market readiness of SAE/GoA Level 3 to 5 automation systems is within reach. The GEMSTAR simulation framework offers manufacturers, authorities, operators and approval bodies a simple and precise way of evaluating vehicle and route compatibility, selecting the optimum infrastructure and testing planned configurations without time-consuming field tests. It supports simulation-based tests of specific vehicle and application area combinations, uses validated sensor models (including from the Test Bed Lower Saxony), helps to further develop common standards for sustainable data utilisation, enables precise statements on system performance even in early development phases, identifies challenges in automated operation and supports the derivation of sensible measures. The resulting test reports can serve as the basis for approvals.
The GEMSTAR toolchain is a powerful tool that supports the required safety case for automated road and rail vehicles and thus paves the way for a safe market launch.
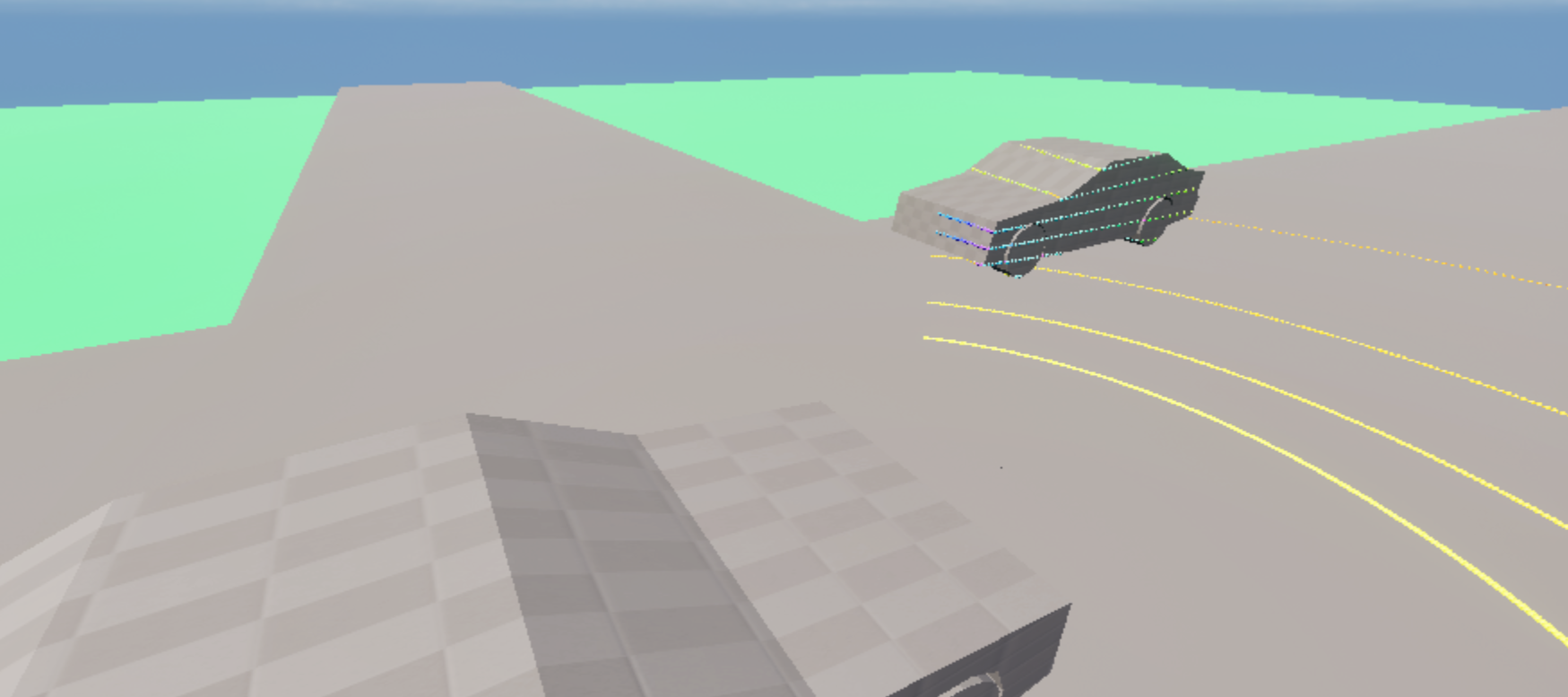
Simulation-based validation and verification with GEMSTAR.
Reliability – GEMSTAR is reliable thanks to the use of valid real data as the basis for the simulations
Flexibility – GEMSTAR is flexible because new modules can be integrated quickly
Efficiency – GEMSTAR is efficient thanks to the ability to evaluate complex relationships faster than in real tests
Projects
The basic modules of the tool chain were successfully developed and used in projects such as Gaia-X 4 PLC AAD, VVMethods, SetLevel and SYNERGIES. In the SetLevel project, project participants such as BMW, Bosch, IPG Automotive and the German Aerospace Center (DLR) worked on a common understanding and architecture for traffic simulations. GEMSTAR was based on this structure.
The first use of GEMSTAR in the railway sector was in the project ARTE with Alstom.
GEMSTAR is currently being used for the first time to assess the operating areas of automated vehicles in the projects IMoGer and AUTOGVZ.
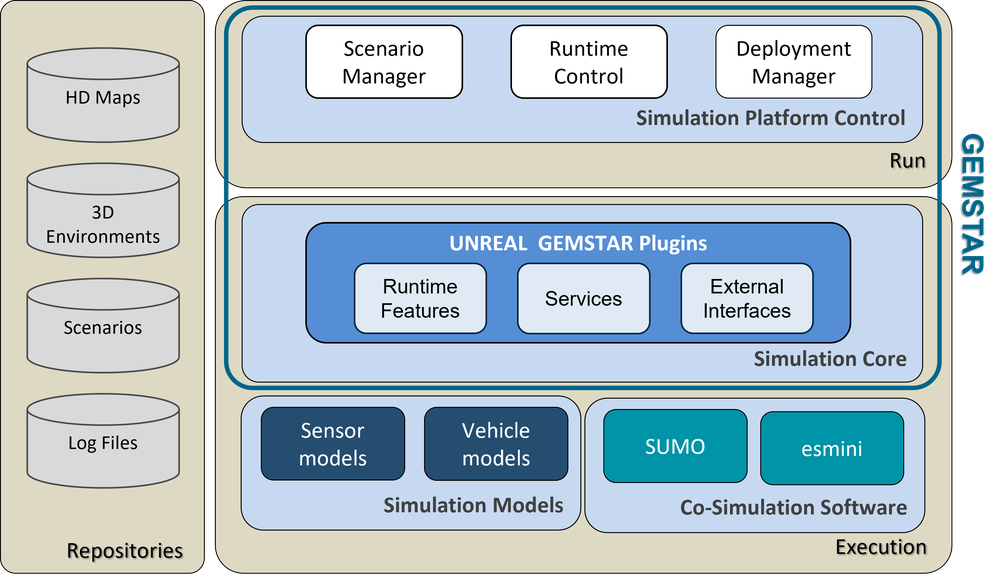
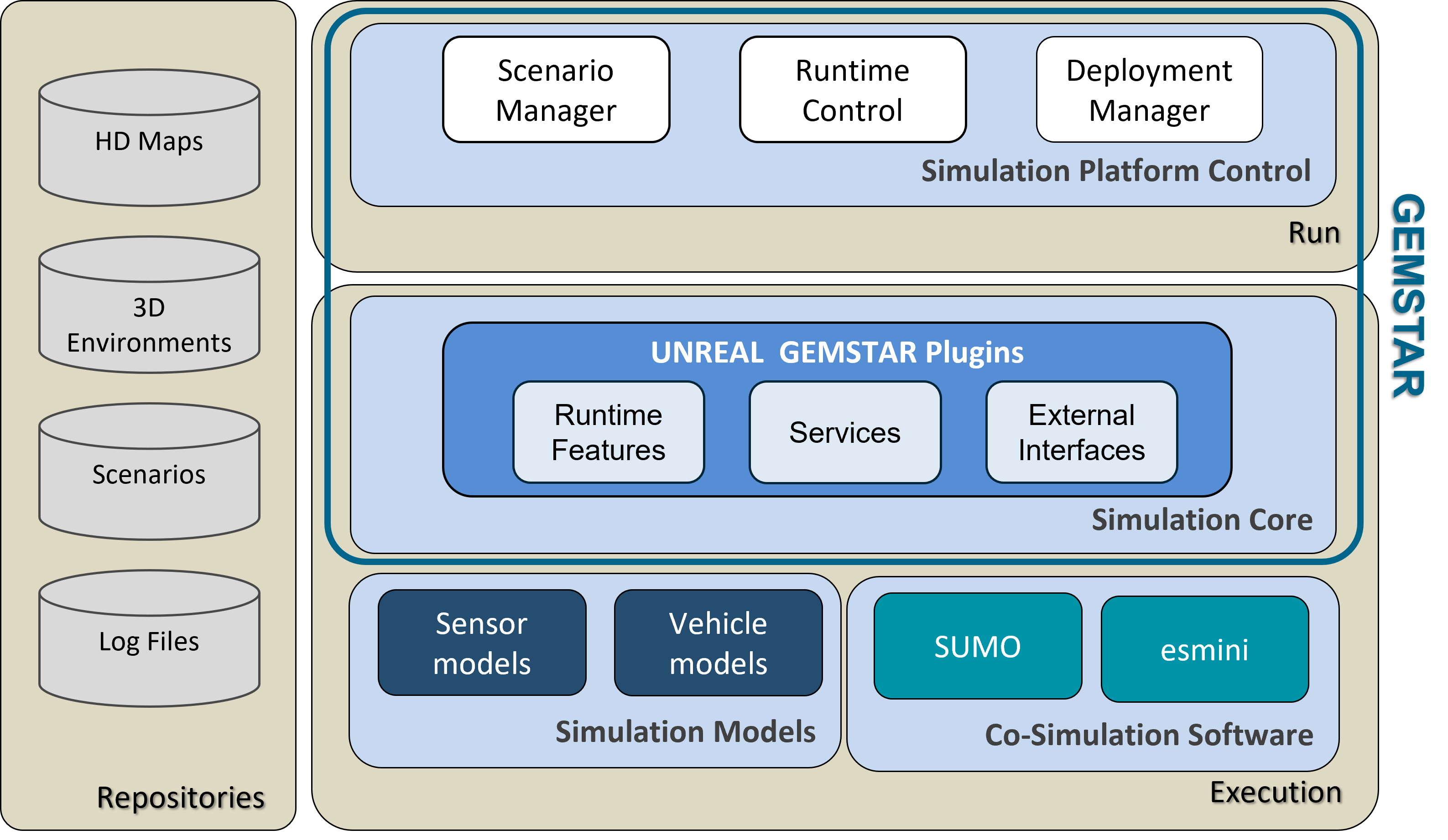
GEMSTAR integrates a wide variety of models of sensors, vehicle dynamics or vehicle automation systems and, thanks to centralised co-simulation mechanisms, can also integrate common simulation tools such as Eclipse SUMO or esmini.
GEMSTAR is developed for Windows, but can also be run in Docker containers under Linux.
A key feature for applications in railway research is the implemented link between GEMSTAR and the RailSiTe® railway laboratory.




{kind=link}
{kind=link}