GEMSTAR – GEoMetry based Sensor simulation Toolchain for Automotive and Rail research
Szenarien-basierte Verifikation und Validierung für automatisiertes Fahren
Dank moderner szenariobasierter Verifikations- und Validierungs-Werkzeuge rückt die Marktreife von Automatisierungssystemen der SAE/GoA Level 3 bis 5 in greifbare Nähe. Das Simulationsframework GEMSTAR bietet Herstellern, Behörden, Betreibern und Zulassungsstellen eine einfache und präzise Möglichkeit, Fahrzeug- und Streckenkompatibilität zu bewerten, optimale Infrastruktur auszuwählen und geplante Konfigurationen ohne aufwändige Feldtests zu prüfen. Es unterstützt simulationsbasierte Tests spezifischer Fahrzeug- und Einsatzbereichskombinationen, nutzt validierte Sensormodelle (u.a. aus dem Testfeld Niedersachsen), hilft gängige Standards für nachhaltige Datennutzung weiterzuentwickeln, ermöglicht präzise Aussagen zur Systemleistung auch in frühen Entwicklungsphasen, identifiziert Herausforderungen bei automatisiertem Betrieb und unterstützt bei der Ableitung sinnvoller Maßnahmen. Die daraus resultierenden Testberichte können als Grundlage für Zulassungen dienen.
Mit der Toolchain GEMSTAR steht ein leistungsfähiges Werkzeug zur Verfügung, welches den erforderlichen Safety Case automatisierter Straßen- und Schienenfahrzeuge unterstützt und damit den Weg zur sicheren Markteinführung ebnet.
Simulationsbasierte Validierung und Verifikation mit GEMSTAR.
Zuverlässigkeit – GEMSTAR ist zuverlässig, durch die Nutzung valider Realdaten als Basis der Simulationen
Flexibilität – GEMSTAR ist flexibel, da schnell neue Module integriert werden können
Effizienz – GEMSTAR ist effizient, dank der Möglichkeit komplexe Zusammenhänge schneller als in Realtests bewerten zu können
Projekte
Die grundlegenden Module der Werkzeugkette wurde erfolgreich in Projekten wie Gaia-X 4 PLC AAD, VVMethoden, SetLevel und SYNERGIES entwickelt und eingesetzt. Im Projekt SetLevel arbeiteten Projektbeteiligte wie BMW, Bosch, IPG Automotive und DLR an einem gemeinsamen Verständnis und einer Architektur für Verkehrssimulationen. Diese Struktur wurde GEMSTAR zugrunde gelegt.
Mit Alstom erfolgte im Projekt ARTE der erste Einsatz von GEMSTAR im Bahnbereich.
Aktuell wird GEMSTAR erstmalig für die Bewertung von Betriebsbereichen automatisierter Fahrzeuge in den Projekten IMoGer und AUTOGVZ eingesetzt.
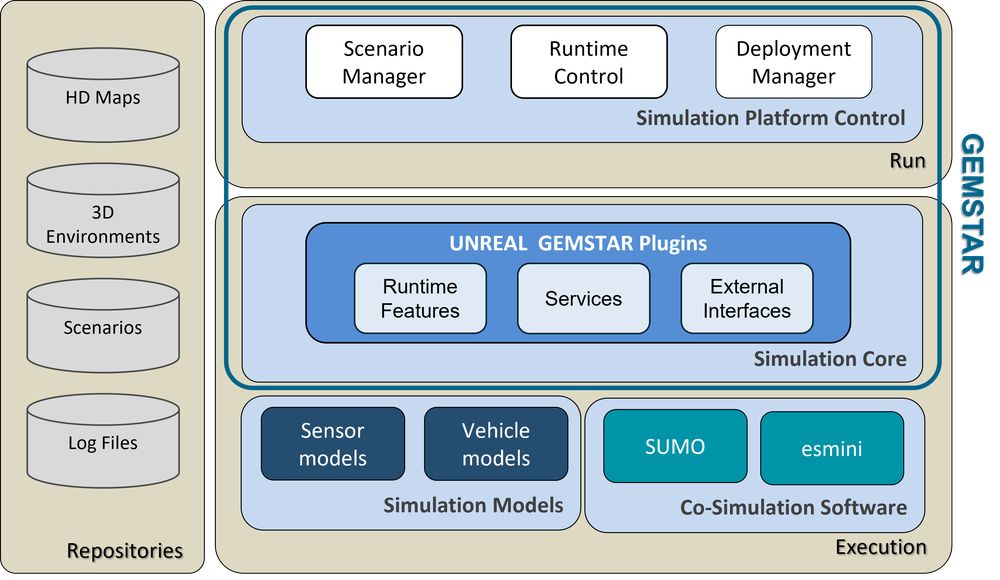
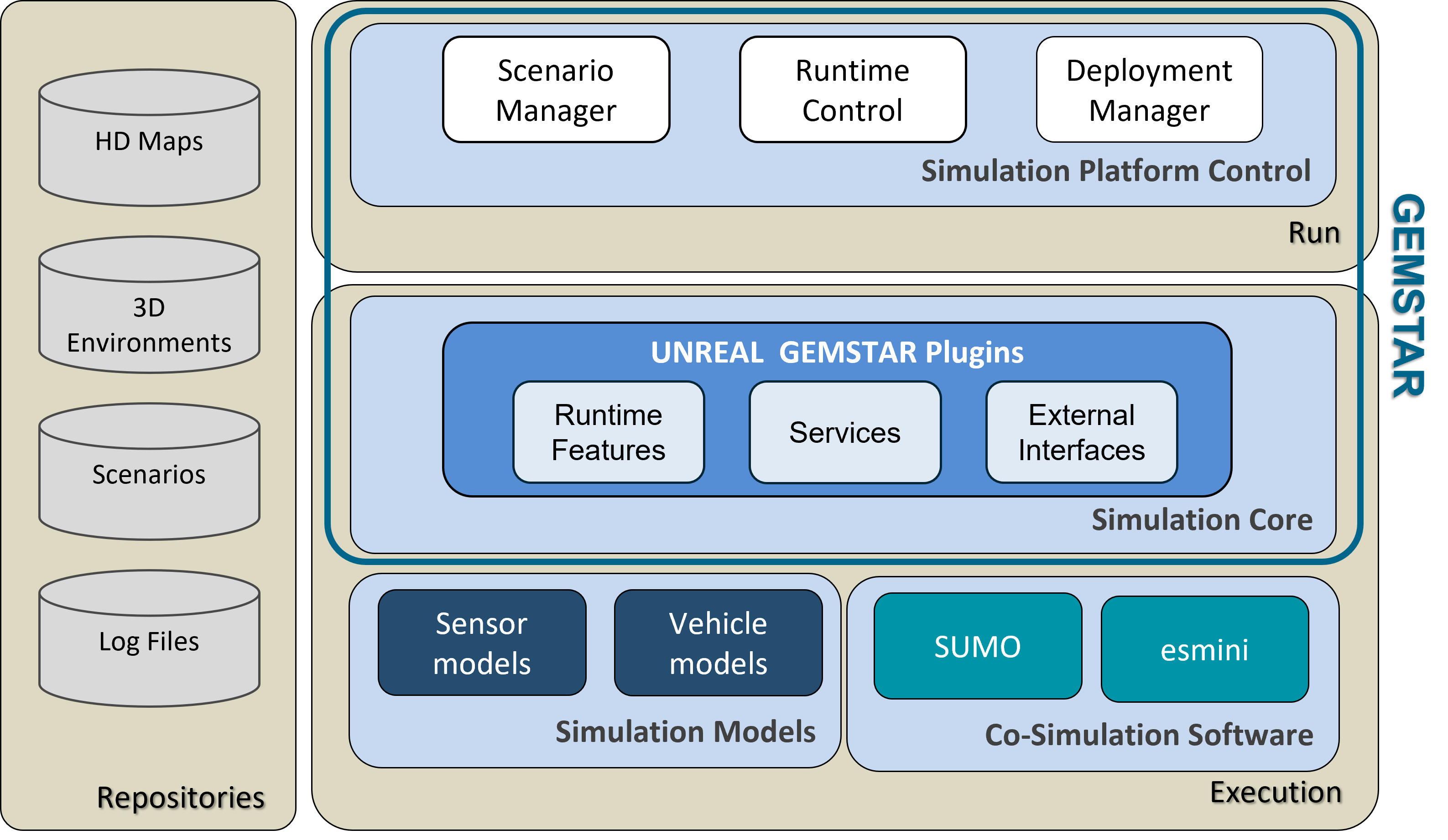
GEMSTAR integriert unterschiedlichste Modelle von Sensoren, Fahrdynamiken oder Fahrzeugautomationssystemen und kann dank zentraler Co-Simulationsmechanismen auch gängige Simulationswerkzeuge wie Eclipse SUMO oder esmini einbinden.
GEMSTAR ist für Windows entwickelt, kann aber auch in Docker-Container unter Linux ausgeführt werden.
Für Anwendungen in der Bahnforschung ist ein zentrales Feature die umgesetzte Kopplung von GEMSTAR an das Bahnlabor RailSiTe®.




{kind=link}
{kind=link}