Gab es außerirdisches Leben auf dem Mars und wie kann man es finden?
VaMEx Initiative – Valles Marineris Explorer
NASA
Flüssiges Wasser ist die Grundlage allen Lebens auf der Erde. Auf dem Mars hat es einst ebenfalls Meere gegeben. Im Valles Marineris, dem tiefsten Grabenbruch des Mars und im gesamten Sonnensystem kann bis heute physikalisch betrachtet flüssiges Wasser existieren. Die Suche nach außerirdischem Leben ist hier also am sinnvollsten. Um das Valles Marineris sinnvoll untersuchen zu können, verfolgt das DLR den Ansatz eines Roboterschwarms. Er soll selbstständig navigieren sowie kooperativ und kollaborativ verschiedene Orte von Interesse (Points of Interest, POI) erreichen können. In der VaMEx-Initiative wird untersucht, wie diese Roboter einst funktionieren können.
Das Valles Marineris ist der größte Grabenbruch unseres Sonnensystems und erstreckt sich entlang des Marsäquators. Er hat eine Länge von 4.000 Kilometern und eine Tiefe von mehr als sieben Kilometern, an einigen Stellen sogar bis zu zehn Kilometern. Auf der Planetenoberfläche des Mars liegt der atmosphärische Umgebungsdruck bei ungefähr sechs Millibar, was dem Triple-Punkt des Wassers entspricht: Das bedeutet, dass flüssiges Wasser dort physikalisch nicht existieren kann. Auf der Oberfläche des Mars kann Wasser nur in Form von Eis oder Wasserdampf in der Atmosphäre vorkommen. Am Grund des Valles Marineris liegt der Atmosphärendruck jedoch bei knapp 13 Millibar, also oberhalb des Triple-Punkts des Wassers, weshalb hier Wasser in seinem flüssigen Aggregatzustand auftreten kann.
Flüssiges Wasser spielt in der Astrobiologie für die Suche nach außerirdischem Leben eine herausragende Rolle. Nach heutigem Kenntnisstand ist davon auszugehen, dass sämtliches Leben, das auf der Erde entstanden ist, seinen Ursprung in den frühen Ozeanen hat. Der Mars hat in seiner Frühzeit eine ähnliche Entwicklung wie die Erde durchlaufen und war einst von Meeren bedeckt. Anders als auf der Erde endete diese Phase auf dem Mars jedoch in einer globalen Eiszeit, die bis heute andauert. In den ersten gut 1,5 Milliarden Jahren seiner Existenz könnte aber ähnlich wie auf der Erde auch auf dem Mars Leben entstanden sein, beginnend mit einzelligen Organismen bis hin zu Mehrzellern.
Ziel des Projekts VaMEx (Valles Marineris Explorer) ist die Erforschung und Suche nach nicht-terrestrischen Lebensformen im Valles Marineris auf dem Mars mit Hilfe eines autonomen Drohnenschwarms, bestehend aus Rovern, Crawlern und unbemannten Luftfahrzeugen (UAVs). Eine der wichtigsten Fragen die die Weltraumforschung begleitet, ist die nach dem Leben. Sie teilt sich in zwei Schwerpunkte auf: Existiert neben dem uns bekannten irdischen Leben noch anderes? Können irdische Lebensformen auf anderen Himmelskörpern überleben? Neben den Eismonden Europa und Enceladus steht auch unser Nachbarplanet Mars im Fokus der Suche nach vergangenem oder gegenwärtigem außerirdischem Leben oder potenziellem Lebensraum für irdische Lebensformen.
Rover, Crawler & Drohnen auf dem Mars – das Projekt Valles Marineris Explorer
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
Rover, Crawler & Drohnen auf dem Mars – das Projekt Valles Marineris Explorer
Ziel des Projekts VaMEx (Valles Marineris Explorer) ist die Erforschung und Suche nach nicht-terrestrischen Lebensformen im Valles Marineris auf dem Mars mit Hilfe eines autonomen Drohnenschwarms, bestehend aus Rovern, Crawlern und unbemannten Luftfahrzeugen (UAVs). Eine der wichtigsten Fragen die die Weltraumforschung begleitet, ist die nach dem Leben. Sie teilt sich in zwei Schwerpunkte auf: Existiert neben dem uns bekannten irdischen Leben noch anderes? Können irdische Lebensformen auf anderen Himmelskörpern überleben? Neben den Eismonden Europa und Enceladus steht auch unser Nachbarplanet Mars im Fokus der Suche nach vergangenem oder gegenwärtigem außerirdischem Leben oder potenziellem Lebensraum für irdische Lebensformen.
Im Valles Marineris könnten Reste dieser einstigen Meere in Form von kleinen Tümpeln mit flüssigem Wasser erhalten geblieben sein. Sie wären dann noch immer ein mögliches Refugium für außerirdisches Leben. Dies kann jedoch nur vor Ort durch Roboter am Boden untersucht werden. Das Terrain für eine robotische Exploration ist äußerst vielfältig und komplex. Es müssen Steilhänge, Schluchten, Höhlen und unter der Oberfläche liegende ehemalige Lavaausflusskanäle erkundet werden, kurz: Umgebungen, die Leben als biologische Nische u.a. auch vor der intensiven UV-Strahlung der Sonne schützen. Besser als ein einzelner Rover wäre hierzu ein Netzwerk aus mehreren Robotern geeignet, die sich laufend, fahrend und fliegend fortbewegen können. Sie sollen automatisiert navigieren und Untersuchungen durchführen. Ein solcher heterogener Roboterschwarm ist – bezogen auf die Gesamtmission – zuverlässiger, flexibler, erweiterbarer sowie pro Roboter kostengünstiger, als eine einzelne Robotermission.
Das Valles Marineris ist ein großes Gebiet: Um von einem sicheren Landeplatz aus zu einem Punkt zu gelangen, an dem die Suche nach Leben attraktiv ist, sind mitunter sehr große Distanzen zurückzulegen. Um dies in einer akzeptablen Zeitspanne zu schaffen, müssen sich die Schwarmdrohnen mit ausreichend hoher Geschwindigkeit bewegen. Hierzu müssen sie zuverlässig Hindernisse und schwieriges Gelände wie beispielsweise sehr feinen Sanduntergrund erkennen, und in Echtzeit eine Entscheidung treffen, ob sie ggf. einen anderen Weg wählen. Der Einsatz eines solchen Roboterschwarms steht also vor großen Herausforderungen: Er kann nicht von der Erde aus gesteuert werden, da ein Funkbefehl wenigstens neun Minuten benötigt, um auf dem Mars anzukommen. Je nach Relativabstand des Mars zur Erde dauert dieser Zeitraum gar 20 Minuten. Ferngesteuert würde ein Roboter pro Tag nur wenige Zentimeter vorankommen. Jeder Roboter muss also in der Lage sein, seine Position innerhalb des zerklüfteten Geländes autonom zu bestimmen. Zudem soll er sich selbstständig darin bewegen können. Insbesondere muss er auch autonom Entscheidungen treffen können, ob ein geplanter Bewegungspfad als sicher oder als gefährlich einzustufen ist. Fahrende und laufende Roboter stehen beispielsweise vor einem Problem, wenn sich der Untergrund doch anders verhält, als ursprünglich gedacht. Dieser Herausforderung kann mit verschiedenen Sensoren des Roboters begegnet werden, die der sofortigen Kenntnis der aktuellen Umgebung dienen und eine angepasste Entscheidungsfindung ermöglichen.
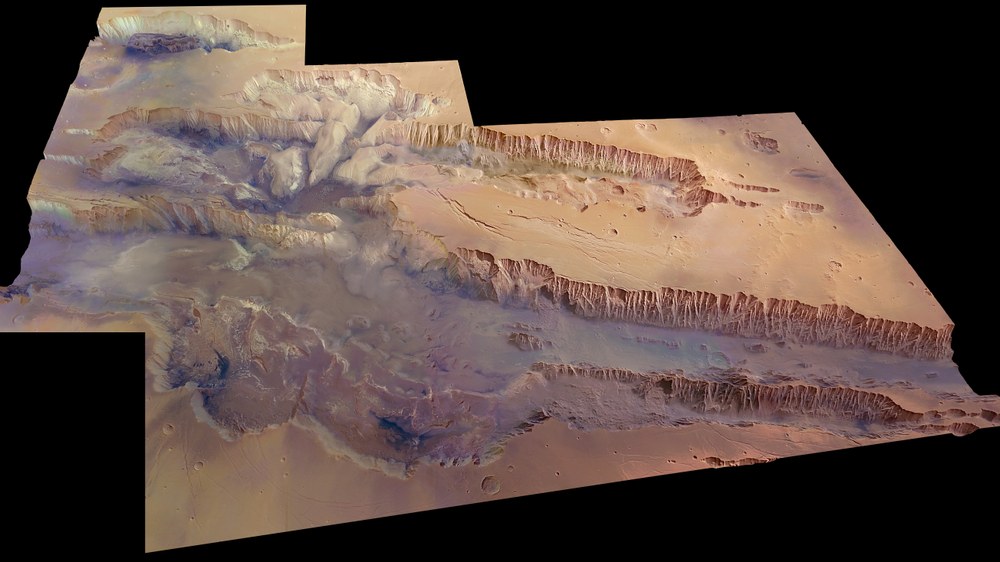
Geländemodell des Valles Marineris
Geländemodell des Valles Marineris aus einem Winkel von 45 Grad zur Oberfläche in nahezu originalgetreuen Farben. Das Bild deckt eine Fläche von 630.000 Quadratkilometern mit einer Bodenauflösung von 100 Metern pro Pixel ab. Das Modell wurde aus 20 einzelnen Aufnahmen der hochauflösende Stereokamera HRSC erstellt. Der größte Teil des Grabenbruchs, der sich quer über das Bild erstreckt, ist als Melas Chasma bekannt. Candor Chasma ist die Verbindungsrinne unmittelbar im Norden, mit der kleinen Rinne Ophir Chasma dahinter. Hebes Chasma ist ganz oben links auf dem Bild zu sehen.
Der Roboterschwarm muss sich zudem als Ganzes selbst organisieren können. Dafür muss jeder Roboter wissen, wo sich alle anderen Teile des Schwarms befinden. Auf der Erde hilft hierbei Satellitennavigation, die es so auf dem Mars jedoch nicht gibt. Daher müssen alle Roboter mithilfe ihrer Bordinstrumente ihre eigene Position im Gelände sowie untereinander bestimmen können. Diese Positionsinformationen lassen sich dann in einer gemeinsamen Karte der Umgebung und des Schwarms zusammentragen.
In der VaMEx-Initiative werden innovative Navigations- und Explorationstechnologien für all diese Anwendungsfälle entwickelt. Hierdurch soll die weitgehend autonome Erkundung des Valles Marineris möglich werden. Neben der Erforschung und Konzeption neuer Ansätze liegt der Fokus vor allem auch auf der Vorabdemonstration der entwickelten Kerntechnologien in Feldtestkampagnen in möglichst marsähnlichen Umgebungen auf der Erde, wie sie in sehr trockenen Wüsten gegeben sind.
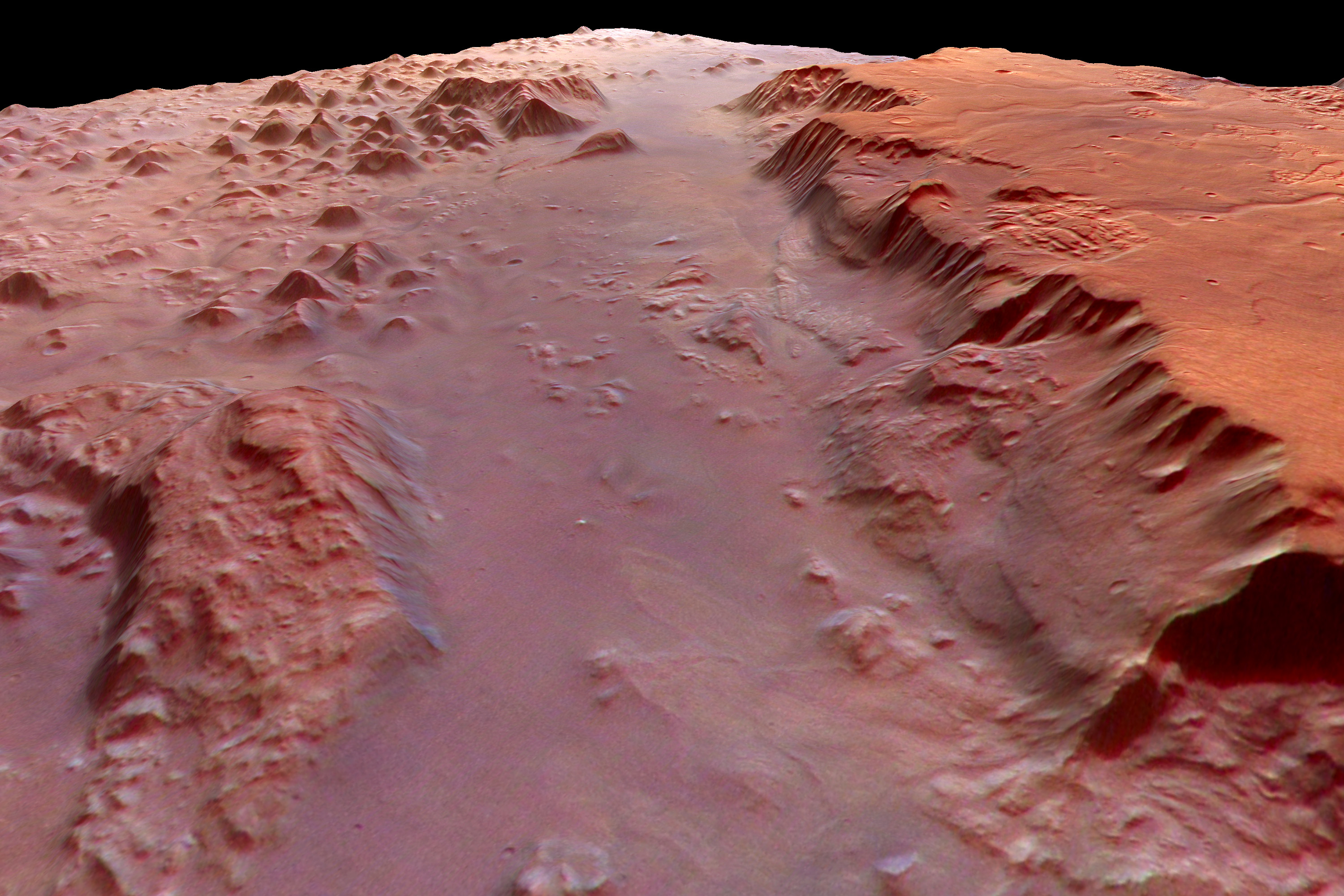
Eos Chasma, der südliche Teil des Valles Marineris auf dem Mars
Das Bild, 2004 aufgenommen von der hochauflösenden Stereokamera HRSC an Bord der ESA-Sonde Mars Express, zeigt den südlichen Teil der Valles Marineris, genannt Eos Chasma. Die Bildauflösung beträgt etwa 80 Meter pro Pixel. Der Boden des Grabenbruchs ist in einem Dunst verborgen, der von der Kamera nicht durchdrungen werden kann. Es wird vermutet, dass sich am Grund des Grabens flüssiges Wasser befindet, in dem Leben existieren könnte.
Die VaMEx-Initiative besteht aus mehreren einander ergänzenden und aufeinander aufbauenden Forschungsprojekten. Vier Projekte konnten bislang abgeschlossen werden: In VaMEx-CoSMiC, dem Initialverbundvorhaben, wurden ab 2012 die Grundlagen für die Navigation von laufenden, fahrenden und fliegenden Robotern mittels ihrer Bordinstrumente wie Laserscannern (LIDAR), Kameras und Funkkommunikation entwickelt. Außerdem wurden Verfahren untersucht, die es dem Roboterschwarm ermöglichen, sich selbstständig zu organisieren.
In einer anschließenden Entwicklungsphase wurde ab 2015 in VaMEx-VIPE eine Umfeldwahrnehmung für einen menschähnlichen Laufroboter auf Basis optischer Sensoren entwickelt. Diese Sensorik regelt zudem die Lage der Körperelemente des Roboters. Im Vorhaben VaMEx-LAOLa wurde untersucht, wie die Ortung der Schwarmroboter auf der Planetenoberfläche gelingen kann, ohne dass hierzu Satelliten benötigt werden. In VaMEx-VTB wurde der Drohnenschwarm in einer virtuellen Testumgebung abgebildet.
Diese zuvor entwickelten Teilsysteme werden aktuell in der etwa dreijährigen Phase „VaMEx-3“ in ein Gesamtsystem integriert. Hierzu werden die Systeme und Verfahren eng vernetzt und in insgesamt fünf Teilvorhaben weiterentwickelt. Alle Teilprojekte von VaMEx-3 haben eine gemeinsame Anforderungsanalyse durchgeführt und werden 2025 die Ergebnisse in einem gemeinsamen Feldtest präsentieren.
Im Teilprojekt VaMEx3-VRN wird die virtuelle Testumgebung aus VaMEx-VTB weiterentwickelt, um die Software und Hardware der Roboter in einer praxisnahen Simulation, die dem Feldtest vorangeht, erproben zu können. In VaMEx3-RGE werden die Algorithmen zur Navigation und Umfeldwahrnehmung weiterentwickelt und in das VaMEx3-Gesamtsystem integriert. Im Mittelpunkt von VaMEx3-APO steht die Entwicklung einer ausfallsicheren Positions- und Lagebestimmung. In VaMEx3-AE werden fliegende Roboter an die speziellen atmosphärischen Bedingungen des Mars angepasst. Im 2024 neu hinzugekommenen Verbundvorhaben VaMEx3-MarsSymphony wird eine Möglichkeit entwickelt, mit der Roboter, die sich in einer Höhle befinden, dennoch mit Satelliten kommunizieren und auch in dieser besonderen Umgebung eigenständig und sicher navigieren können. So können später Höhlen und auch Lavatunnel innerhalb des Valles Marineris untersucht werden. Durch Ergänzung und Integration von mehreren Kleinsatelliten in das VaMEx Gesamtsystem soll die Autonomie des Roboterschwarms weiter erhöht werden.




{kind=link}
{kind=link}

